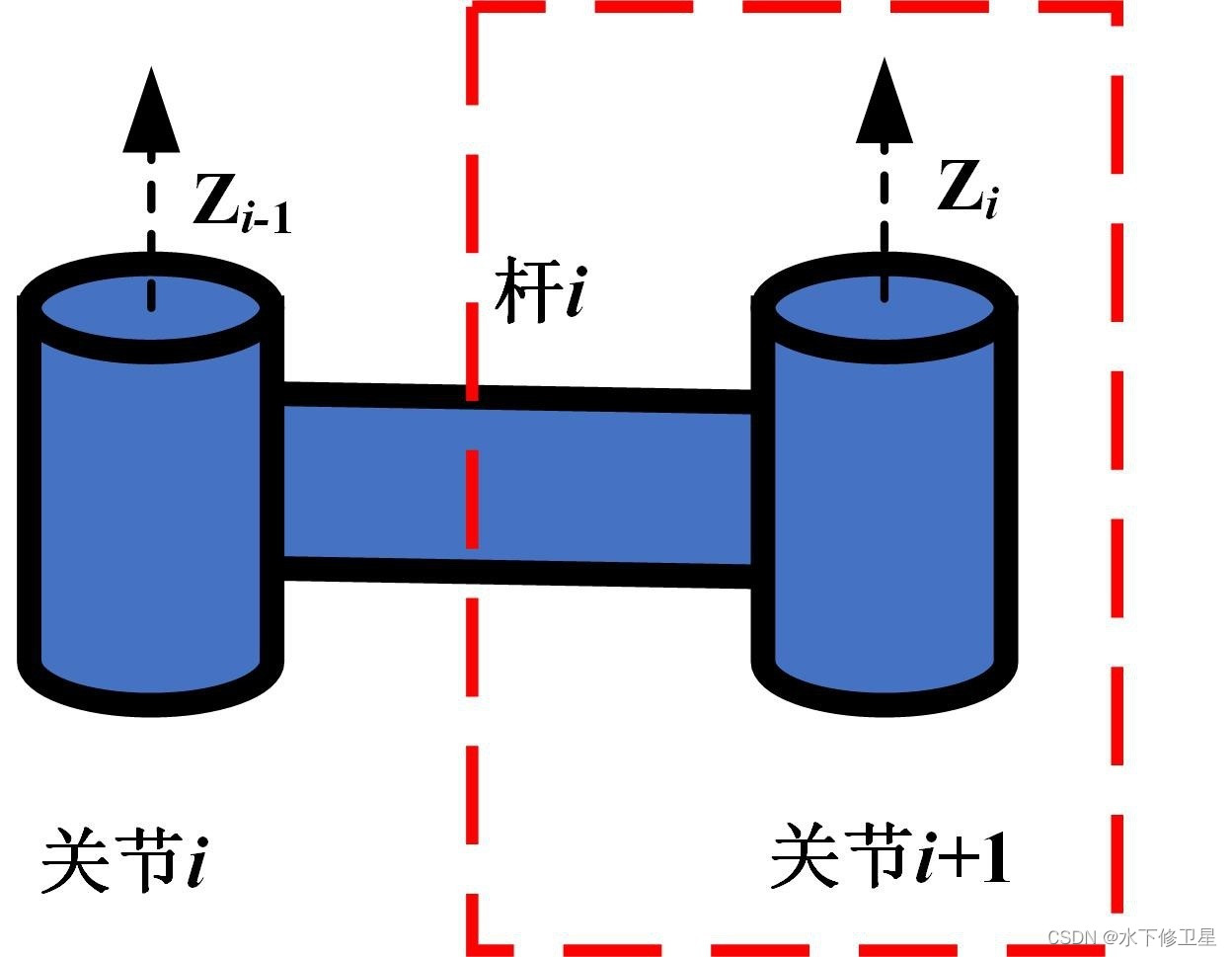
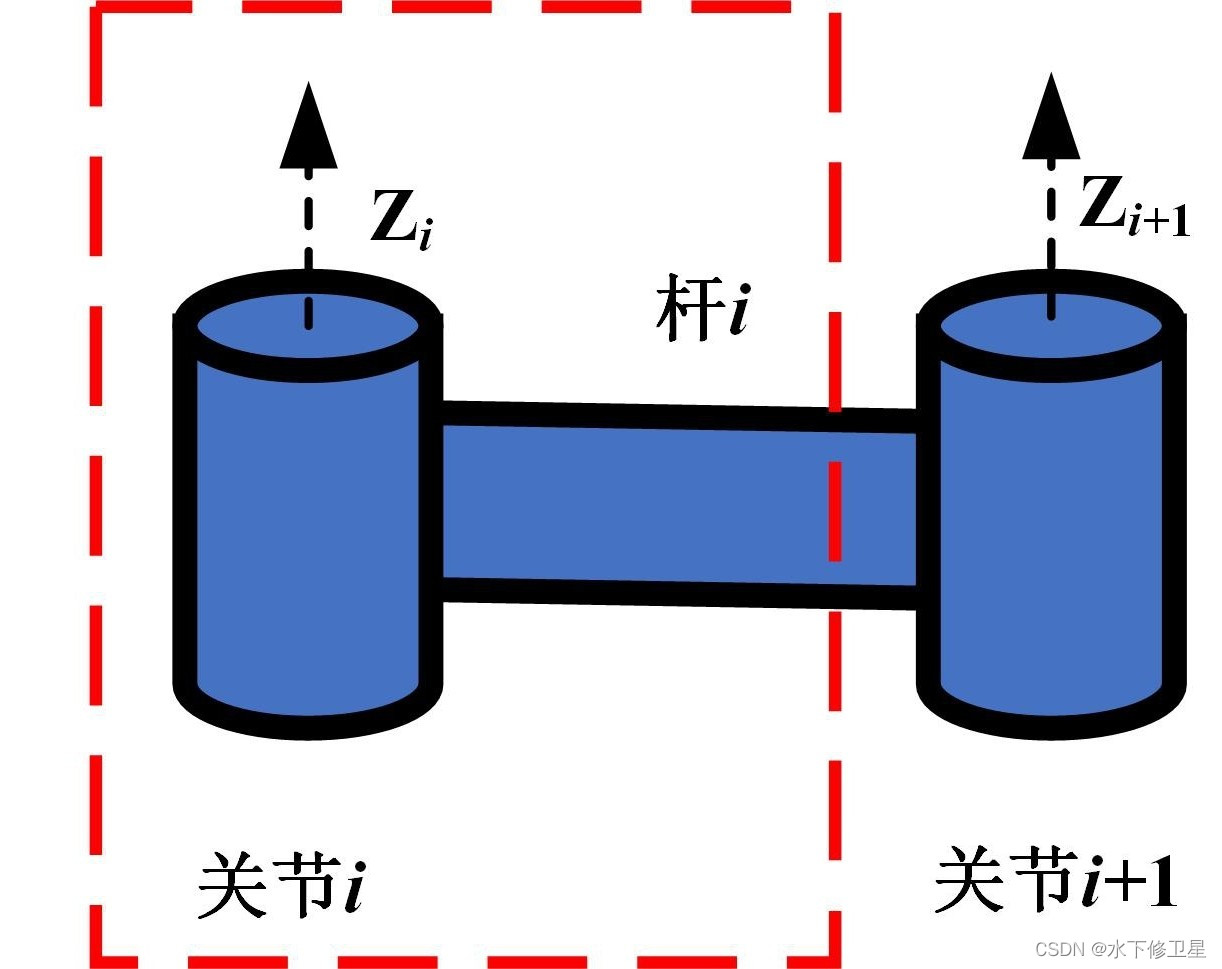
DH法是建立串联机器人连杆坐标系最常用的方法,目前学术界同时存在标准DH和改进DH两种建系方法,如图所示。连杆编号:基座为 L i n k 0 Link0 Link0,从基座往后依次定义为 L i n k 1 Link1 Link1, L i n k 2 Link2 Link2,…, L i n k i Linki Linki;关节编号: L i n k i Linki Linki离基座近的一端(近端)的关节为 J o i n t i Jointi Jointi,远的一端(远端)为关节 J o i n t i + 1 Jointi+1 Jointi+1。

一、标准DH(Standard DH)
坐标系位置:连杆坐标系坐落于连杆远端
x x x轴方向:当前 z z z轴和前一个 z z z轴公垂线方向
变换顺序: θ → d → α → a \theta\rightarrow d\rightarrow\alpha\rightarrow a θ→d→α→a
n − 1 T n = R o t z ( θ ) T r a n s ( d ) R o t x ( α ) T r a n s ( a ) ^{n-1}T_{n}=Rotz(\theta)Trans(d)Rotx(\alpha)Trans(a) n−1Tn=Rotz(θ)Trans(d)Rotx(α)Trans(a)
二、改进DH(Modified DH)
坐标系位置:连杆坐标系坐落于连杆近端
x x x轴方向:当前 z z z轴和后一个 z z z轴公垂线方向
变换顺序: α → a → θ → d \alpha\rightarrow a\rightarrow\theta\rightarrow d α→a→θ→d
n − 1 T n = R o t x ( α ) T r a n s ( a ) R o t z ( θ ) T r a n s ( d ) ^{n-1}T_{n}=Rotx(\alpha)Trans(a)Rotz(\theta)Trans(d) n−1Tn=Rotx(α)Trans(a)Rotz(θ)Trans(d)
三、应用场景
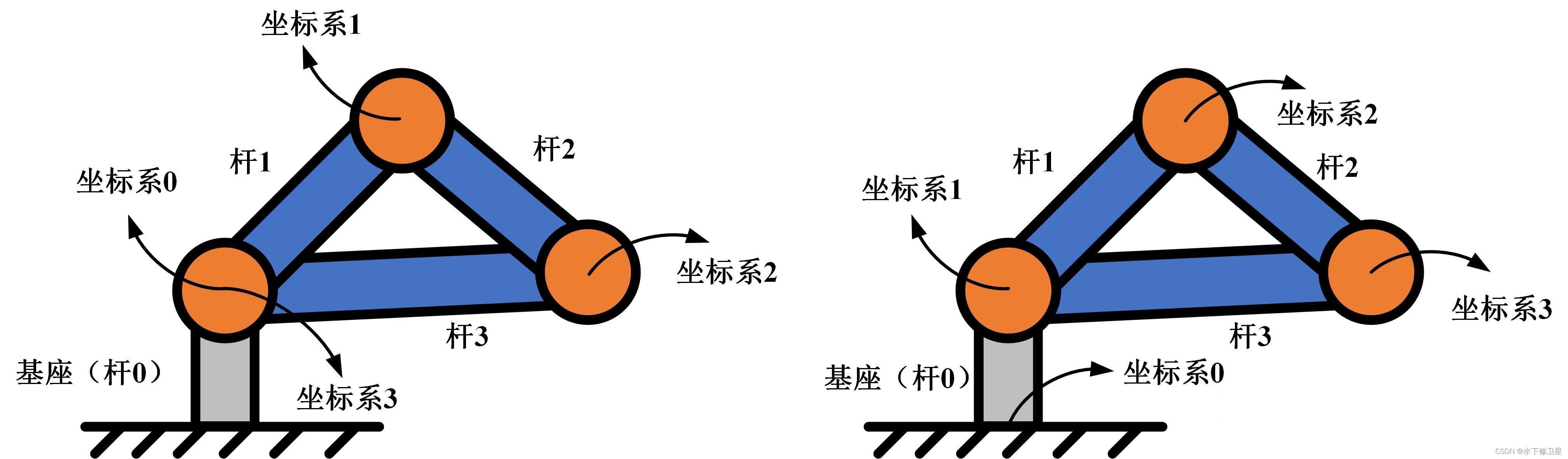
对于树形结构或者闭链机构的机器人来说,按照SDH方法建立的连杆坐标系会产生歧义,因为SDH的建系原则是把连杆i的坐标系建立在连杆的远端,如图3(a)所示,这就导致连杆0上同时出现了两个坐标系。而MDH把连杆坐标系建立在每个连杆的近端,则不会坐标系重合的情况,如图3(b)所示,这就克服了SDH方法建系的缺点。