

一、问题描述
由于大多数开源SLAM算法中都基于ROS开发,各传感器采集的数据通常以ROS的消息类型(sensor_msgs)进行发布和订阅。就激光雷达(LiDAR)而言,采集的原始点云数据通常以sensor_msgs::PointCloud2的数据类型进行发布,在算法中对点云进行处理时,调用点云开源算法库(PCL)中的功能可以便捷的实现相应功能。PCL库内部也定义了自己的点云数据结构。因此,在处理前,首先需要将点云由ROS的数据类型转换为PCL的数据类型。
ROS中的点云数据类型
-
sensor_msgs::PointCloud:该类型属于较早的版本,以逐渐弃用。
-
sensor_msgs::PointCloud2:目前常用的点云数据类型
PCL 中的点云数据类型
-
">pcl::PointCloud:点云以模板的形式定义,可以用pcl定义好的,也可以自定义
本文旨在分享如何将 sensor_msgs::PointCloud2 转换为 pcl::PointCloud。
二、ROS中点云数据结构:
官方文档说明:ROS sensor_msgs/PointCloud2
std_msgs/Header header:数据头,包含该帧点云的时间戳、坐标系等属性信息
uint32 height:data的高度,一帧点云通常height=1,即表示无序点云;
uint32 width:data的宽度,即每行对应点的数量;
sensor_msgs/PointField[] fields:包含每个点的字段属性信息,详见下文。bool is_bigendian:点云是否按正序排列
uint32 point_step:每个点占用的比特数,1字节=8比特,与PointField里所有字节数之和相等。
uint32 row_step:每行占用的比特数,=点的数量*Point_step;
uint8[] data:序列化后的点云二进制数据,所有点信息都在一串字符中,无法通过data[i]取值。
bool is_dense:是否存在无效点。
最值得关注的变量是:fields。
官方文档:sensor_msgs/PointField[] fields
string name # 点的字段名
uint32 offset # 相对于结构体起始地址的字节数
uint8 datatype # 该字段所占用的字节数
uint32 count # 该字段的数量,通常为1datatype 不同值与类型的对应如下:
uint8 INT8 = 1 // 1字节
uint8 UINT8 = 2 // 1字节
uint8 INT16 = 3 // 2字节
uint8 UINT16 = 4 // 2字节
uint8 INT32 = 5 // 4字节
uint8 UINT32 = 6 // 4字节
uint8 FLOAT32 = 7 // 4字节
uint8 FLOAT64 = 8 // 8字节以某开源数据包为例,回放bag包,编写一个ROS节点订阅其LiDAR数据,代码可参考示例。
VLP-16发布点云的类型为PointCloud2。其fields如下图所示:
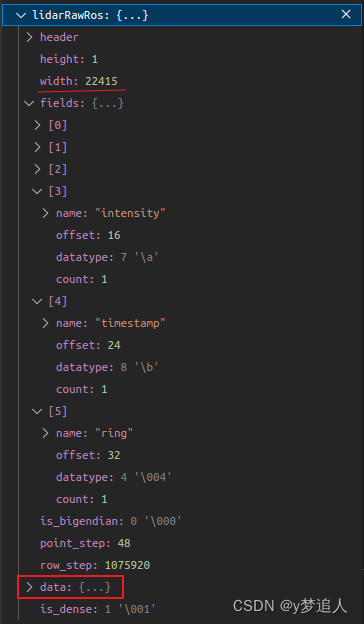
其中:
name值为每个点对应的字段名称,
datatype
fields[0]、fields[1]、fields[2]分别为每个点的x、y、z坐标字段,均为float类型,4个字节。
fields[3]为点云反射强度、float类型,4个字节。
fields[4]为每个点对应的时间戳,double类型,8个字节,64比特,
fields[5]为每个点对应的线ID,值为0~15,2个字节。
三、PCL中的点云数据结构:
PCL中的功能函数多以模板的形式实现,可以使用多种点云类型,
一个典型的PCL点云类型为:X、Y、Z + 其他属性(反射强度、时间、RGB等等)
在将ROS点云转换为PCL点云时,我们期望转换前后,点云拥有相同的属性值,而不是具有反射强度的点云,格式转换后只剩XYZ坐标了。对于普通的点云,PCL定义好的点云数据结构即可满足需求。但是对于特殊点云,我们需要自定义点云结构体。
以LIO-SAM中的一段代码为例,定义自己的PCL点云类型的代码如下:
//定义每个点的数据结构 struct VelodynePointXYZIRT { PCL_ADD_POINT4D //XYZ,PCL宏 PCL_ADD_INTENSITY; //反射强度,PCL宏 uint16_t ring; //线ID float time; //时间 EIGEN_MAKE_ALIGNED_OPERATOR_NEW //PCL宏,确保new操作符对其操作,无须理解,用就完了 } EIGEN_ALIGN16; //注册点类型宏 POINT_CLOUD_REGISTER_POINT_STRUCT (VelodynePointXYZIRT, (float, x, x) (float, y, y) (float, z, z) (float, intensity, intensity) (uint16_t, ring, ring) (float, time, time) )在自定义点云结构体PointT时,需根据传入的sensor_msgs::PointCloud2的fields来定义,
两点要求:
1、自定义结构体的字段命名、数量、顺序需要与fields中的name一致;
2、自定义结构体字段占用的字节数需与datatype一致。比如datatype=7,那么要用float。
若PointT的字段与fields name不一致,编译不会报错,但是运行时,会警告“Failed to find match for field *** ”。
若PointT的字节数与fields datatype不一致,则会取出错误的值,类似指针。本来取4个字节,结果取了8个字节,得到的点云信息肯定是错的,但编译器不提示。
四、类型转换
ROS中已经集成了对PCL的API接口,PCL中也集成了用于转换的结构体PCLPointCloud2。因此我们可以直接调用函数。
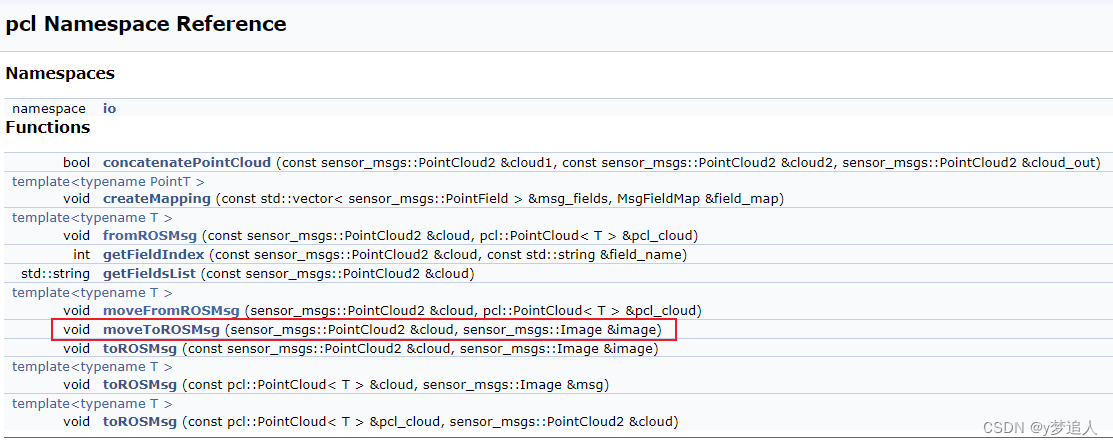
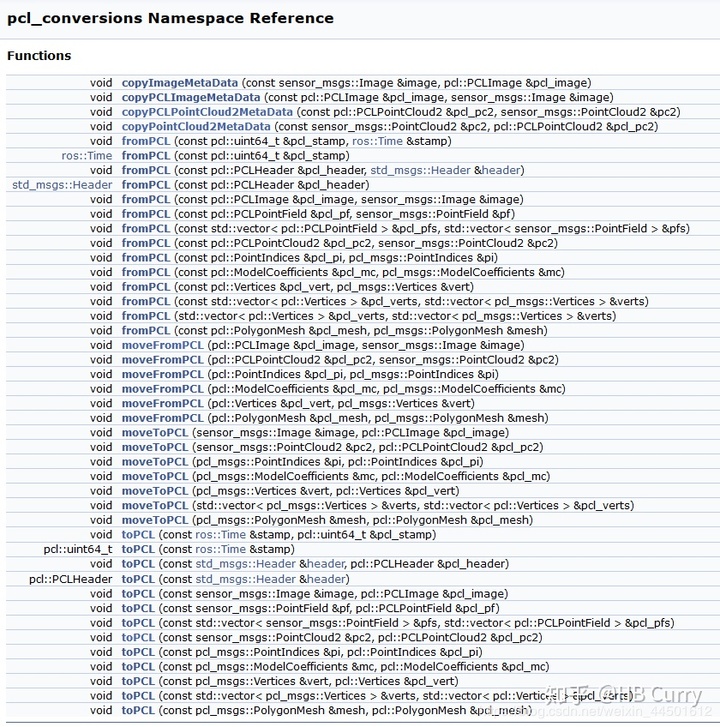
ROS的PCL转换接口主要在pcl_conversions.h中,里边提供了丰富的类型转换函数。实际上,该函数是基于pcl的功能实现了类型转换,对应pcl的函数文件conversions.h
函数名中带move和不带move的区别是,移动(剪切)和拷贝的区别。可以自行转到定义查看他复制data时的操作。
本人使用的是moveFromROSMsg() 函数。首先由ROS的sensor_msgs::PointCloud2类型转换为PCL的pcl::PCLPointCloud2类型,然后再由PCL的pcl::PCLPointCloud2类型转换为PCL的pcl::PointCloud。
template void moveFromROSMsg(sensor_msgs::PointCloud2 &cloud, pcl::PointCloud &pcl_cloud) { pcl::PCLPointCloud2 pcl_pc2; pcl_conversions::moveToPCL(cloud, pcl_pc2); pcl::fromPCLPointCloud2(pcl_pc2, pcl_cloud); }先来看一下第一个函数:pcl_conversions::moveToPCL()
inline void moveToPCL(sensor_msgs::PointCloud2 &pc2, pcl::PCLPointCloud2 &pcl_pc2) { copyPointCloud2MetaData(pc2, pcl_pc2); pcl_pc2.data.swap(pc2.data); } inline void copyPointCloud2MetaData(const sensor_msgs::PointCloud2 &pc2, pcl::PCLPointCloud2 &pcl_pc2) { toPCL(pc2.header, pcl_pc2.header); pcl_pc2.height = pc2.height; pcl_pc2.width = pc2.width; toPCL(pc2.fields, pcl_pc2.fields); pcl_pc2.is_bigendian = pc2.is_bigendian; pcl_pc2.point_step = pc2.point_step; pcl_pc2.row_step = pc2.row_step; pcl_pc2.is_dense = pc2.is_dense; } inline void toPCL(const sensor_msgs::PointField &pf, pcl::PCLPointField &pcl_pf) { pcl_pf.name = pf.name; pcl_pf.offset = pf.offset; pcl_pf.datatype = pf.datatype; pcl_pf.count = pf.count; }由于两个PointCloud2的定义几乎一样,所以这个转换只是简单的copy,field也是copy。
然后重点是第二个函数pcl::fromPCLPointCloud2(),第一步根据源点云的field表和目标点云类型PointT创建一个字段索引map(翻译比较蹩脚,建议直接按英文理解),第二步是从data里按照数据格式逐个memcpy点信息。
fromPCLPointCloud2 (const pcl::PCLPointCloud2& msg, pcl::PointCloud& cloud) { MsgFieldMap field_map; createMapping (msg.fields, field_map); //创建一个field索引表 fromPCLPointCloud2 (msg, cloud, field_map); //转换点云 } template void createMapping (const std::vector& msg_fields, MsgFieldMap& field_map) { // Create initial 1-1 mapping between serialized data segments and struct fields detail::FieldMapper mapper (msg_fields, field_map); for_each_type (mapper); // Coalesce adjacent fields into single memcpy's where possible if (field_map.size() > 1) { std::sort(field_map.begin(), field_map.end(), detail::fieldOrdering); MsgFieldMap::iterator i = field_map.begin(), j = i + 1; while (j != field_map.end()) { // This check is designed to permit padding between adjacent fields. /// @todo One could construct a pathological case where the struct has a /// field where the serialized data has padding if (j->serialized_offset - i->serialized_offset == j->struct_offset - i->struct_offset) { i->size += (j->struct_offset + j->size) - (i->struct_offset + i->size); j = field_map.erase(j); } else { ++i; ++j; } } } } // Return true if the PCLPointField matches the expected name and data type. // Written as a struct to allow partially specializing on Tag. template struct FieldMatches { bool operator() (const pcl::PCLPointField& field) { return (field.name == traits::name::value && field.datatype == traits::datatype::value && (field.count == traits::datatype::size || field.count == 0 && traits::datatype::size == 1 /* see bug #821 */)); } };这个函数的主要作用是,程序也不知道你输入的PointT和原始点云的类型匹配不匹配,比如你的点云是XYZI类型的,非要转成XYZIRGB的也不行啊,所以要检核一下,找出那些匹配的点属性。createMapping()函数的关键在第一行:
FieldMapper (msg_fields) (field_map)中,使用FieldMatches()函数,看看fields与PointT是否匹配:
1、命名要匹配,比如field中叫time,PointT中的也要有叫“time”的字段才行
2、字节大小匹配,field中time是4个字节的,PointT中就要定义time是float32类型的。
这对于后边用指针拷贝每个点的每个属性时,计算地址时很重要,千万不能错。
最后得到的field_map就是哪些匹配成功的字段及它的相对地址(struct_offset和serialized_offset)
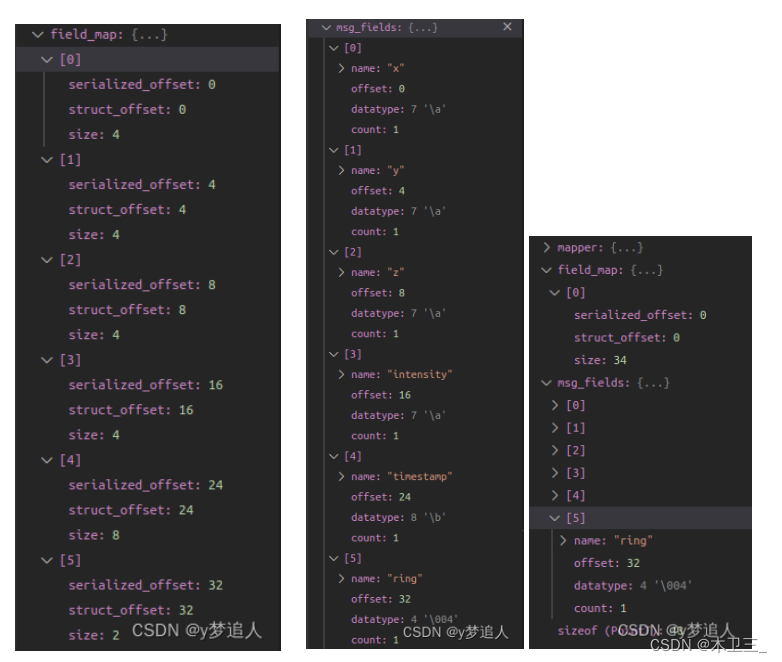
如果相邻的field都能成功匹配,就把这两个字段对应的字节大小合并,
比如三个相邻字段分别对应4字节+4字节+8字节,那我不必一个字段一个字段拷贝,直接拷贝16个字节就好了。
最后就是拷贝点云了:fromPCLPointCloud2 (msg, cloud, field_map),代码如下,
关键代码,首先cloud_data指向第1个点的地址,然后根据对应每个点字节大小步长,以及field_map索引表,用memcpy逐个field、逐个点拷贝。
template void fromPCLPointCloud2 (const pcl::PCLPointCloud2& msg, pcl::PointCloud& cloud, const MsgFieldMap& field_map) { // Copy info fields cloud.header = msg.header; cloud.width = msg.width; cloud.height = msg.height; cloud.is_dense = msg.is_dense == 1; // Copy point data uint32_t num_points = msg.width * msg.height; cloud.points.resize (num_points); uint8_t* cloud_data = reinterpret_cast(&cloud.points[0]); // Check if we can copy adjacent points in a single memcpy if (field_map.size() == 1 && field_map[0].serialized_offset == 0 && field_map[0].struct_offset == 0 && msg.point_step == sizeof(PointT)) { balabala //太长了删掉这段没用的 } else { // If not, memcpy each group of contiguous fields separately for (uint32_t row = 0; row结语
代码比较多,希望耐心看完,如文中有所纰漏,欢迎指点和交流。
希望上述内容对您有帮助。
可供参考的其他官方文档: 在ROS中使用PCL
-







