

本篇文章旨在记录我电赛期间使用openmv和stm32单片机之间进行串口通信,将openmv识别到的坐标传输给单片机。背景是基于2023年全国大学生电子设计大赛E题:舵机云台追踪识别。
单片机的串口通信原理我便不再详细讲解,下面直接上代码分析。
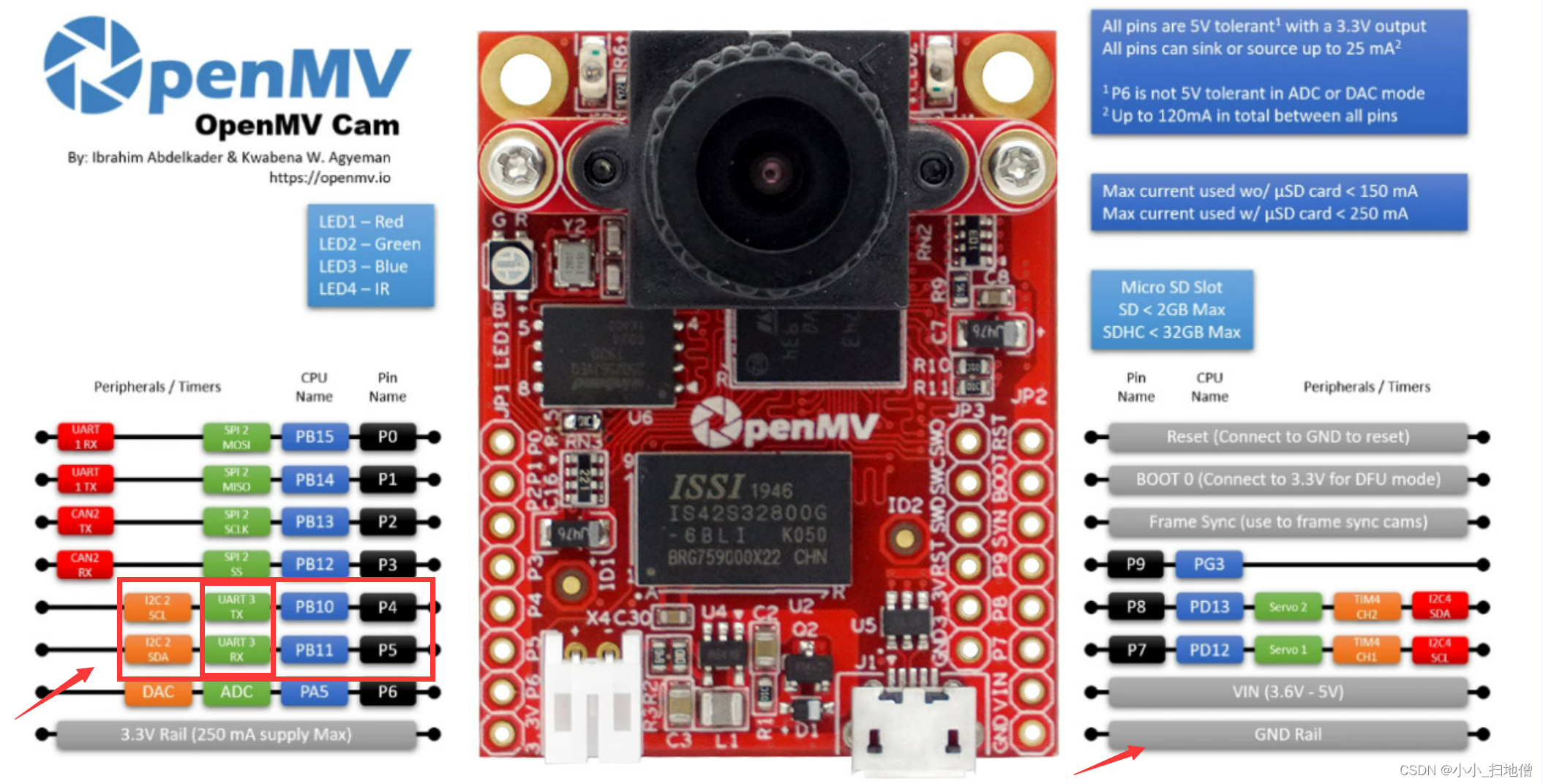
值得注意的是接线:RX——>TX
TX——>RX
单片机和OPENMV必须共地
非常重要!!!!
一、串口通信传输两个数据(x坐标和y坐标)
(一)、 OPENMV串口通信部分
import sensor, image, time,math,pyb from pyb import UART,LED import json import ustruct sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking red_threshold_01=(10, 100, 127, 32, -43, 67) clock = time.clock() uart = UART(3,115200) #定义串口3变量 uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters def find_max(blobs): #定义寻找色块面积最大的函数 max_size=0 for blob in blobs: if blob.pixels() > max_size: max_blob=blob max_size = blob.pixels() return max_blob def sending_data(cx,cy,cw,ch): global uart; #frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B]; #data = bytearray(frame) data = ustruct.pack("






