

线性矩阵不等式(LMI)(一):简单介绍
主要从以下三个方面介绍:
文章目录
- 线性矩阵不等式(LMI)(一):简单介绍
- 1. 线性矩阵不等式
- 1.1 一般形式
- 1.2 标准形式
- 1.3 二者关系
- 2. 线性矩阵不等式的优点
- 2.1 LMI 是一个凸集
- 3. 线性矩阵不等式的发展
- 参考文献
1. 线性矩阵不等式
如名字所示线性矩阵不等式三要素为:
- 线性 - 注意双线性时,LMI不好求解(非凸问题);例:在不等式中出现 P A K PAK PAK形式,其中 P , K P,K P,K都为未知变量;可以利用消元法/换元法[1]转化为LMI形式;
- 矩阵变量 - 可以表示成一般形式/标准形式;
- 不等号 - 表示矩阵的正定/负定,而不是大小关系;
1.1 一般形式
-
LMI的一般形式可以表示为[2]:
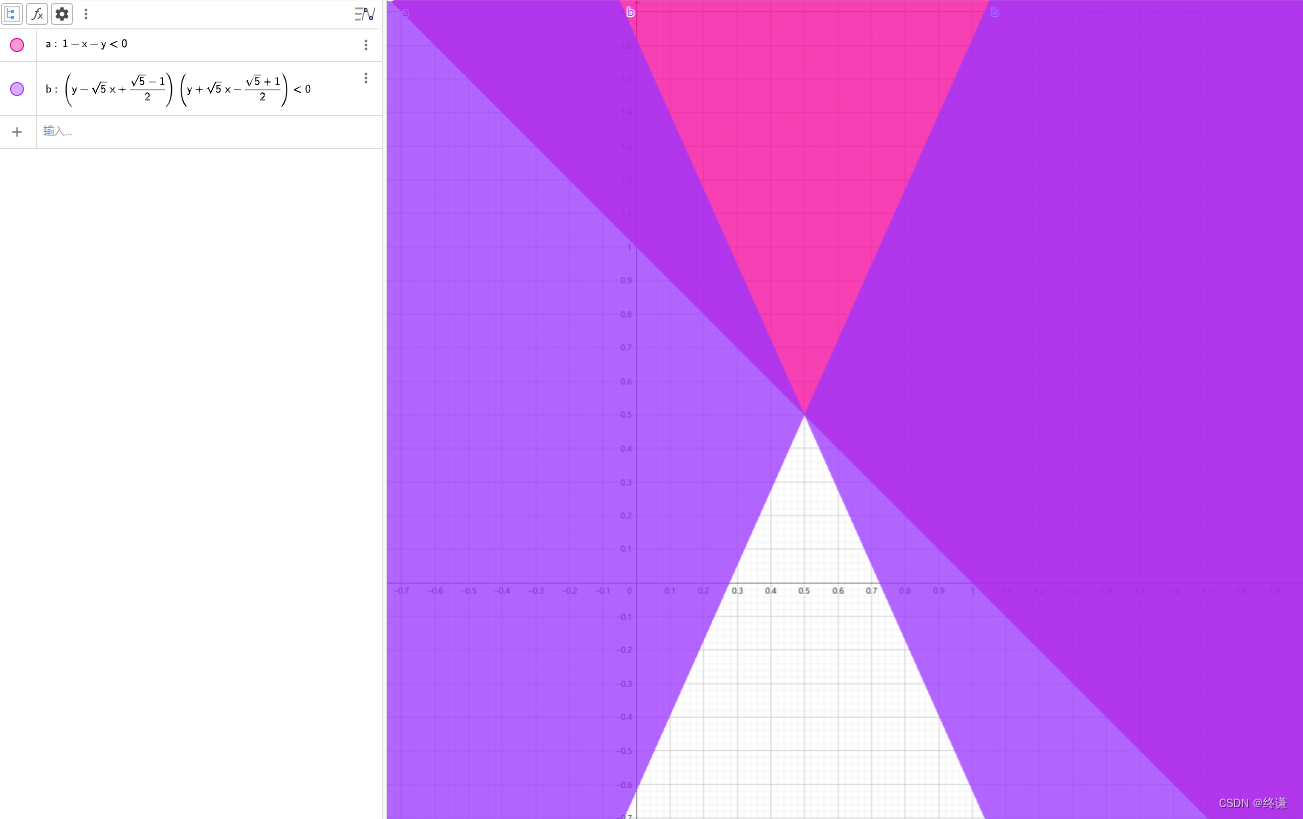
L ( X ) = D T X + X T D + ∑ i = 1 l ( E i T X F i + F i T X T E i ) + Q 0(x2−5 x1+25 −1)(x2+5 x1−25 +1)>0.
根据上式可得 ( x 1 , x 2 ) (x_1,x_2) (x1,x2)取值范围为,下图所示公共部分。
1.3 二者关系
-
让标准形式中 A i , i = 1 , . . . , n A_i,i=1,...,n Ai,i=1,...,n 为一般形式中 P P P的基底,则 P P P可表示为 P = A 0 + x 1 A 1 + ⋅ ⋅ ⋅ + x n A n P = A_0 + x_1A_1 + \cdot\cdot\cdot+x_nA_n P=A0+x1A1+⋅⋅⋅+xnAn。定义 T i = A T A i + A i T A , T_i = A^TA_i+A_i^TA, Ti=ATAi+AiTA,带入到标准形式中,则可将一般形式转化为标准形式
L ( P ) = T 0 + ∑ i = 1 n x i T i L(P) = T_0+\sum_{i=1}^nx_iT_i L(P)=T0+i=1∑nxiTi
- 例:根据Lyapunov稳定理论,二维线性系统
x ˙ ( t ) = A x ( t ) , x ( 0 ) ≠ 0 \dot x(t) = A x(t) , x(0)\neq 0 x˙(t)=Ax(t),x(0)=0
稳定的充要条件是,存在满足不等式
A T P + P A
- 例:根据Lyapunov稳定理论,二维线性系统
-
-
- 参考文献







