

串行外设接口SPI(Serial Peripheral Interface)是由Motorola公司开发的一种通用数据总线。
在某些芯片上,SPI接口可以配置为支持SPI协议或者支持I2S音频协议。 SPI接口默认工作在SPI方式,可以通过软件把功能从SPI模式切换到I2S模式,具体需参考操作手册
串行外设接口(SPI)允许芯片与外部设备以半/全双工、同步、串行方式通信。此接口可以被配置成主模式,并为外部从设备提供通信时钟(SCK)。接口还能以多主配置方式工作。
它可用于多种用途,包括使用一条双向数据线的双线单工同步传输,还可使用CRC校验的可靠通信。
I2S也是一种3引脚的同步串行接口通讯协议。它支持四种音频标准,包括飞利浦I2S标准, MSB和LSB对齐标准,以及PCM标准。它在半双工通讯中,可以工作在主和从2种模式下。当它作为主设备时,通过接口向外部的从设备提供时钟信号。
SPI特点
- 四根通信线:SCK、MOSI、MISO、SS
- 支持全双工同步传输
- 支持总线挂载多设备(一主多从)
- 支持多主机模型,主或从操作
- 支持DMA
- 可配置8位/16位数据帧
- 时钟频率:f(PCLK)/(2, 4, 8, 16, 32, 64, 128, 256)
- 兼容I2S协议等
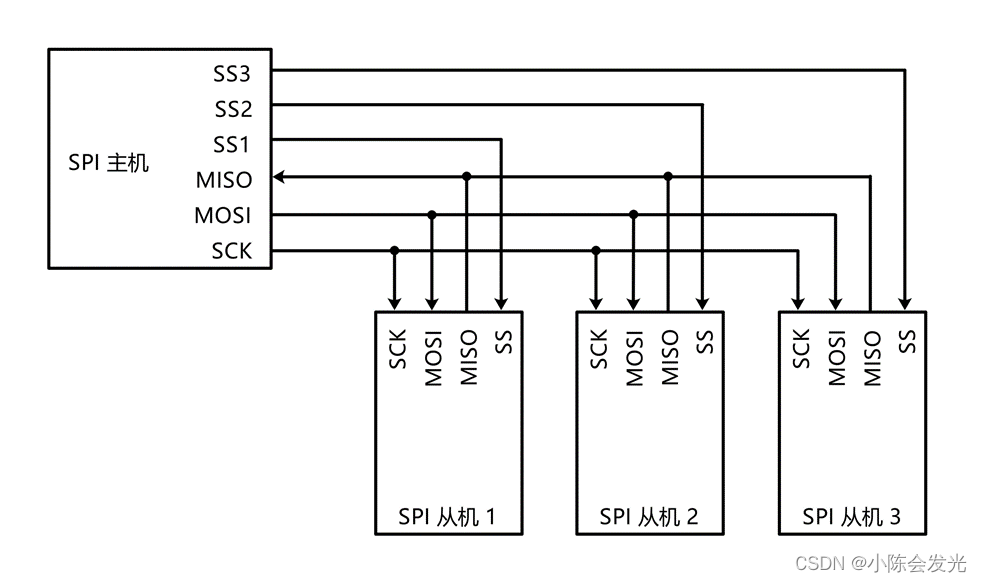
电路连接
- 所有SPI设备的SCK、MOSI、MISO、分别连接在一起。
- 主机另外引出多条SS控制线,分别接到各从机的SS引脚,需要找谁通信就置谁的SS为低电平,同一时间主机只能选择一个从机。
- 输出引脚配置为推挽输出,输入引脚配置为浮空或上拉输入。
- 所有设备需要共地。
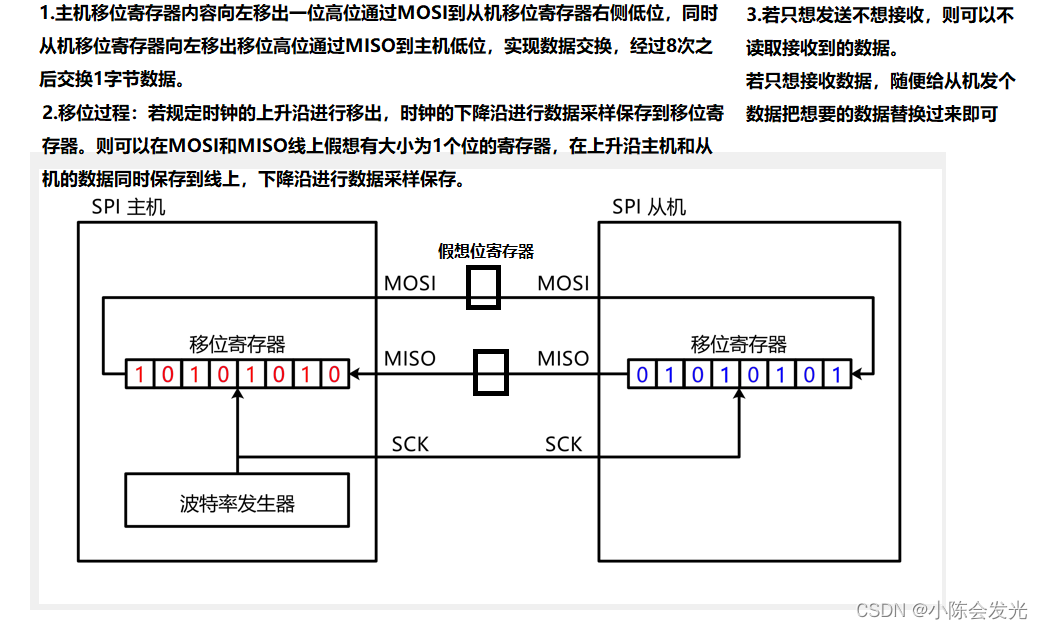
SPI移位示意图
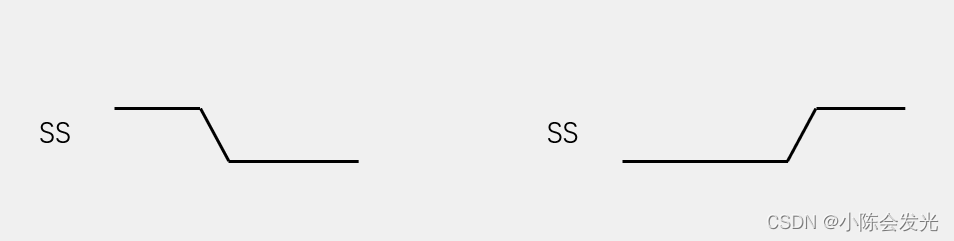
 SPI时序
SPI时序起始条件:SS从高电平切换到地点哦
终止条件:SS从低电平切换到高电平
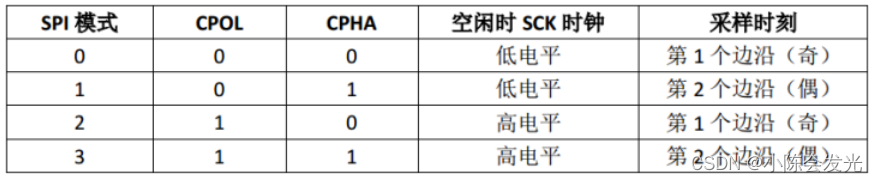
SPI模式
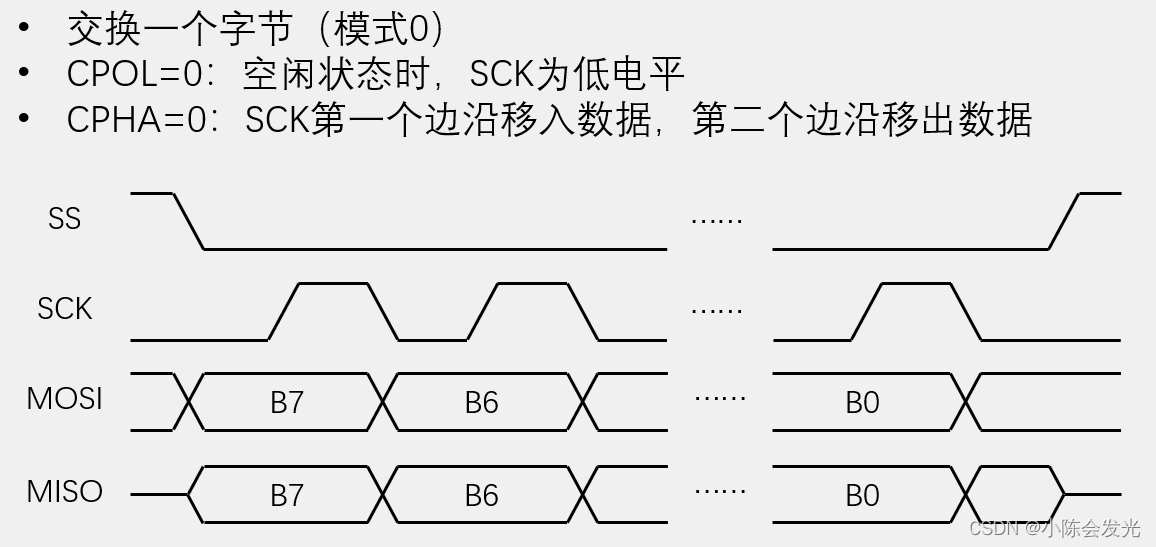
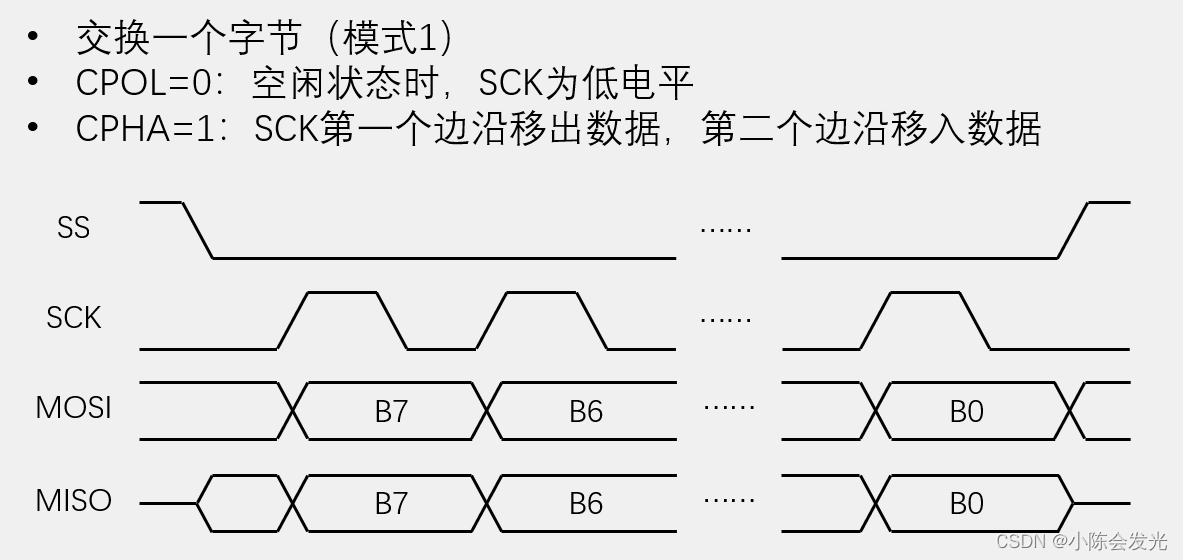
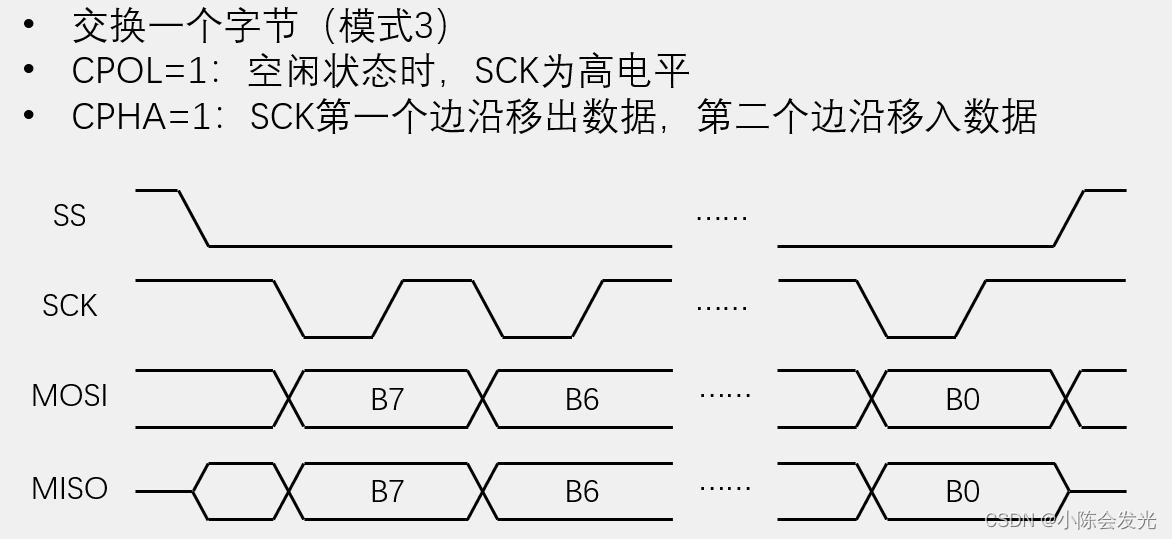
SPI有四种模式通过CPOL时钟极性和CPHA时钟相位来定义
- CPOL=0,表示当SCLK=0时处于空闲态,所以有效状态就是SCLK处于高电平时
- CPOL=1,表示当SCLK=1时处于空闲态,所以有效状态就是SCLK处于低电平时
- CPHA=0,在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。在第2个边沿发送数据
- CPHA=1,在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。在第1个边沿发送数据
 软件SPI设置时序单元
软件SPI设置时序单元数据采样==移入数据
模式0
模式1
模式2

模式3
软件SPI代码
以模式0为例,只需对相位和极性修改即可得到其他模式
//SPI写SS引脚电平 void MySPI_W_SS(uint8_t BitValue) { GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue);//根据BitValue,设置SS引脚的电平 } //SPI写SCK引脚电平 void MySPI_W_SCK(uint8_t BitValue) { GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue);//根据BitValue,设置SCK引脚的电平 } //SPI写MOSI引脚电平 void MySPI_W_MOSI(uint8_t BitValue) { GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue); //根据BitValue,设置MOSI引脚的电平,BitValue要实现非0即1的特性 } //SPI读MISO引脚电平 uint8_t MySPI_R_MISO(void) { return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6); //读取MISO电平并返回 } //SPI初始化 void MySPI_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4、PA5和PA7引脚初始化为推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入 /*设置默认电平*/ MySPI_W_SS(1); //SS默认高电平 MySPI_W_SCK(0); //SCK默认低电平 } //SPI起始 void MySPI_Start(void) { MySPI_W_SS(0); //拉低SS,开始时序 } //SPI终止 void MySPI_Stop(void) { MySPI_W_SS(1); //拉高SS,终止时序 } //SPI交换传输一个字节,使用SPI模式0 uint8_t MySPI_SwapByte(uint8_t ByteSend) { uint8_t i, ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到 for (i = 0; i > i)); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线 MySPI_W_SCK(1); //拉高SCK,上升沿移出数据 if (MySPI_R_MISO() == 1){ByteReceive |= (0x80 >> i);} //读取MISO数据,并存储到Byte变量 //当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0 MySPI_W_SCK(0); //拉低SCK,下降沿移入数据 } return ByteReceive; //返回接收到的一个字节数据 // for(i=0;i







