

一、篇头
- 全志H713平台,作为FHD投影的低成本入门方案,其公板上也配齐了许多投影使用的模组,本文即介绍投影仪调焦所用的步进电机,此模组的驱动原理、配制方法、调试方法。
- 因为条件限制,本文采用的是H618香橙派Z3平台,驱动从H713上移植过来(遵循GPL协议)。
步进电机驱动视频-WeChat_20240225222000
二、准备工作
2.1 步进电机

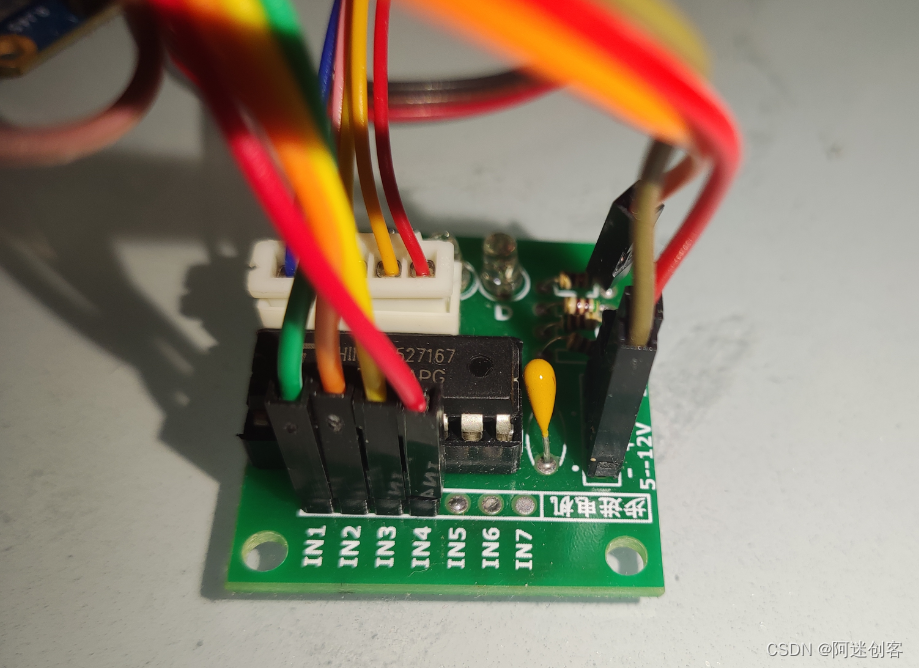
2.2 驱动板

2.3 主控平台
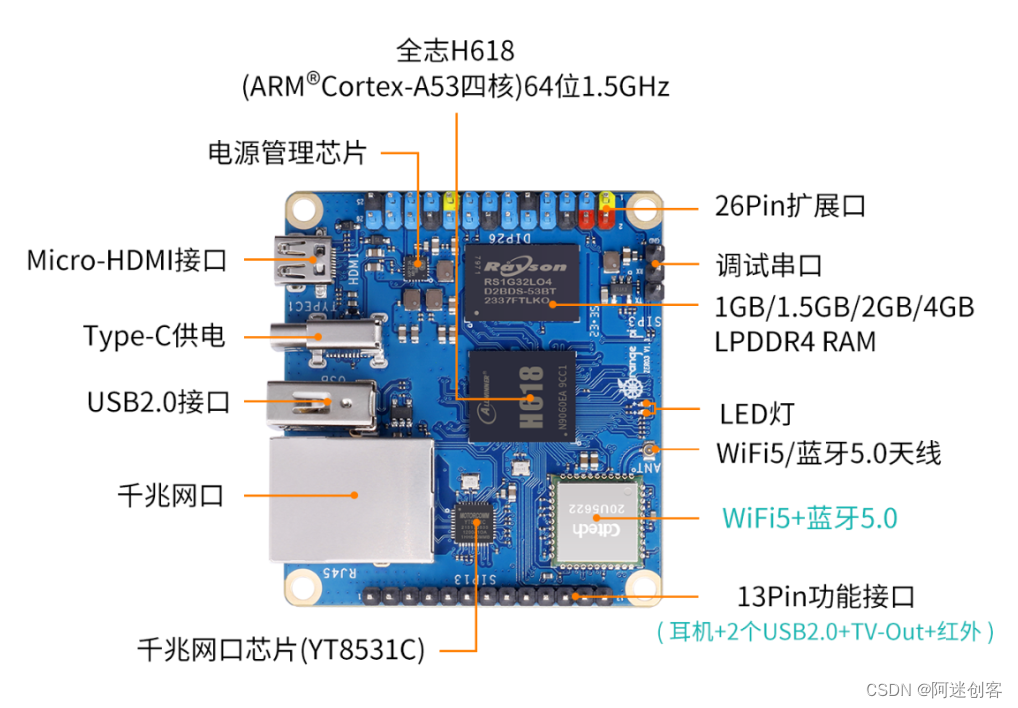
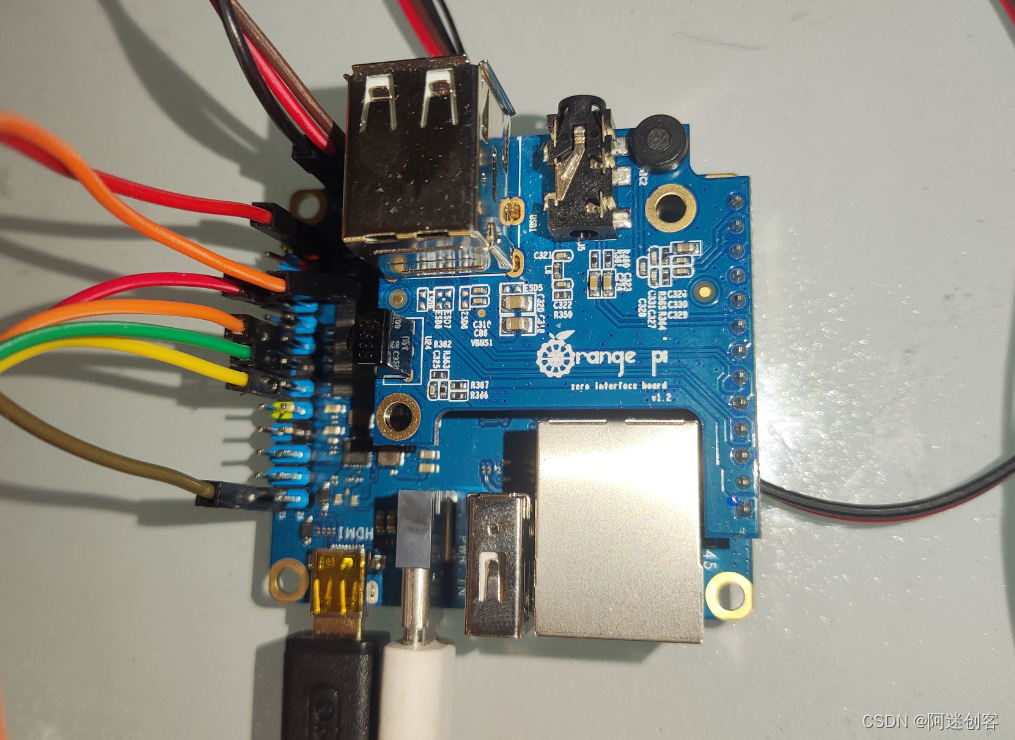
2.3.1 H618开发板(本文采用)
- 香橙派Z3 1G DDR
2.3.2 H713
- 缺开发板,方法和代码
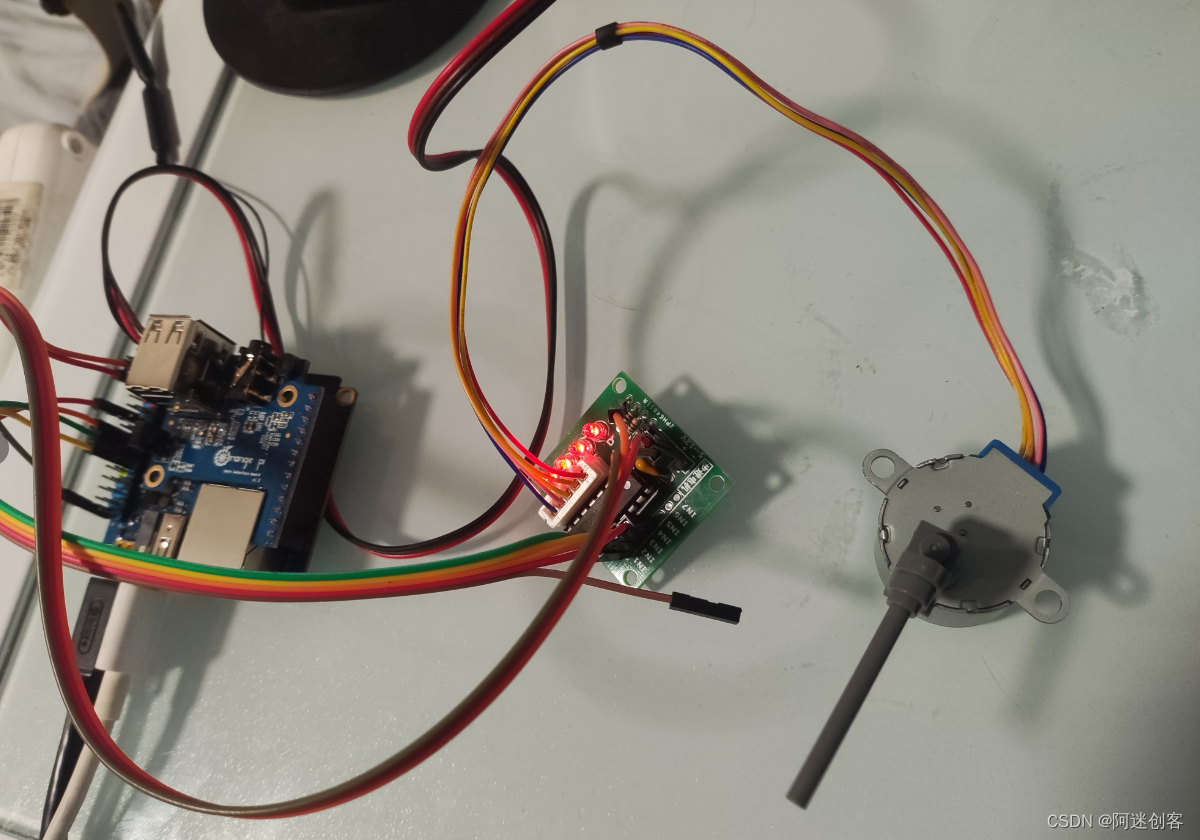
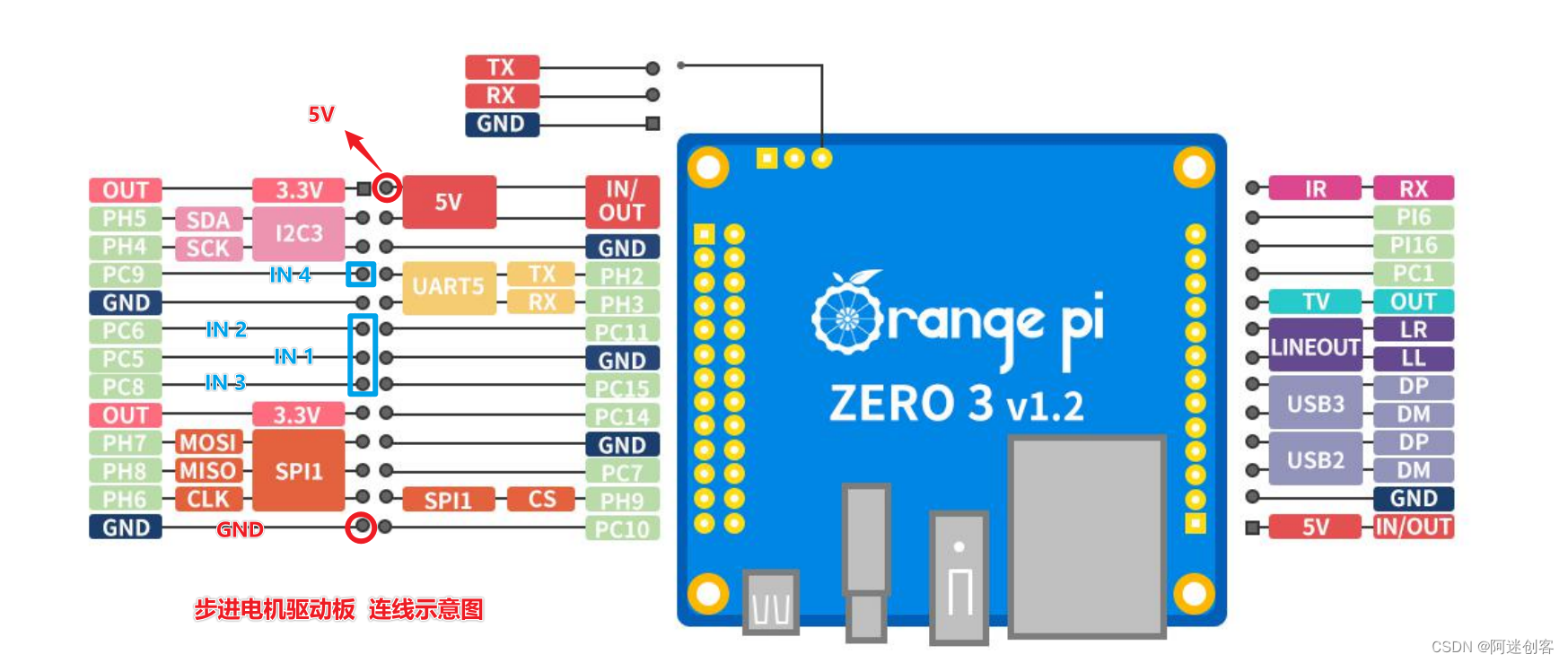
2.4 连线示意图
准备好适当的若干杜板线,将板子连接好。
- GPIO PC9 --> 驱动板 IN 4
- GPIO PC8 --> 驱动板 IN 3
- GPIO PC6 --> 驱动板 IN 2
- GPIO PC5 --> 驱动板 IN 1
- 最后链接5V、GND
三、驱动原理
3.1 驱动板原理图

3.2 驱动电机的方法
(1)1相励磁法: 4相4拍
每一瞬间只有一个线圈相通,其它休息。 优点:简单,耗电低,精确性良好。 缺点:力矩小,振动大,每次励磁信号走的角度都是标称角度。 1相励磁法 A->B->C->D 按GPIO的说法: GPIO-A(IN 1) 拉高,其余拉低 -> GPIO-B(IN 2),其余拉低 -> GPIO-C(IN 3),其余拉低 -> GPIO-D(IN 4),其余拉低
(2)2相励磁法: 4相4拍
每一瞬间有两个线圈导通。 优点:力矩大,震动小。 缺点:每励磁信号走的角度都是标称角度。 2相励磁法 AB->BC->CD->DA 按GPIO的说法: GPIO-A/B(IN 1/2) 拉高,其余拉低 -> GPIO-B/C(IN 2/3),其余拉低 -> GPIO-C/D(IN 3/4),其余拉低 -> GPIO-D/A(IN 4/1),其余拉低
(3)1-2相励磁法: 4相8拍
1相和2相交替导通。 优点)精度较高,运转平滑,每送一个励磁信号转动1/2标称角度,称为半步驱动。 1-2相励磁法 A-->AB-->B->BC->C-->CD->D-->DA 按GPIO的说法: GPIO-A(IN 1) 拉高,其余拉低 -> GPIO-A/B(IN 1/2) 拉高,其余拉低 -> GPIO-B(IN 2),其余拉低 -> 依次类推,轮流让引脚上电、断电
3.3 用二进制表示(1-2相励磁法)
3.3.1 逆时针
u8 phase_CW[8] = {0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09}; 二进制: 1000,1100,0100,0110,0010,0011,0001,1001 ABCD视角:A000,AB00,0B00,0BC0,00C0,00CD,000D,A00D3.3.2 顺时针
u8 phase_CCW[8]= {0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08}; 二进制: 1001,0001,0011,0010,0110,0100,1100,1000 ABCD视角:A00D,0000D,00CD,00C0,0BC0,0B00,AB00,A0003.3.3 图示
-
当GPIO-A拉高时,LED-A亮;拉低时,LED-A灭;其余LED与此相同,H-亮灯, L-灭灯。
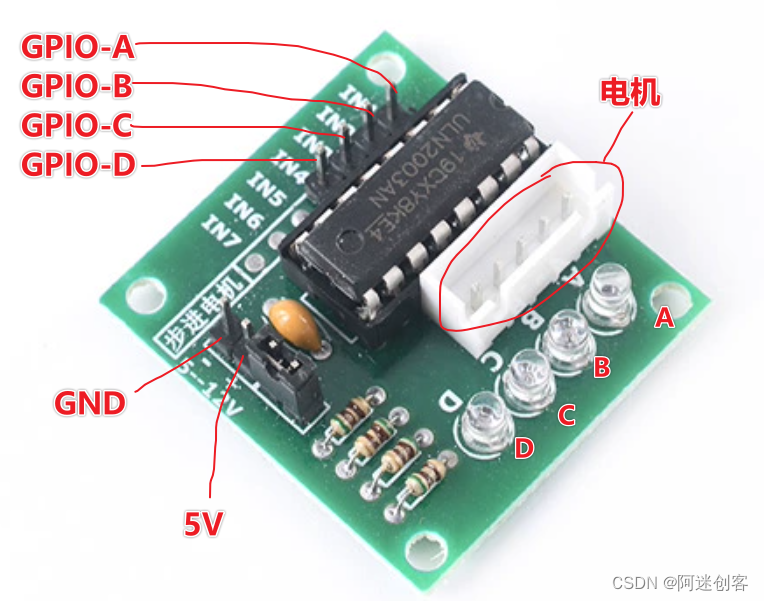
-
上图是ULN2003步进电机驱动模块,可以看到上面的标号分别是A,B,C,D,因此代码我们可以按这个顺序来理解。
-
比如:AB是1100,BC是0110,CD是0011等
四、驱动实现
全志H713平台已内置此驱动。样例代码网上已有很多,此处仅取部分片段,并通过DTS的配置来详解各个参数的意义。
4.1 DTS配置
- board.dts 增加如下配置,同时将其余用到PC 5,6,8,9的地方做disabled处理,避免冲突
motor_24byj48: motor_24byj48 { compatible = "motor-control"; motor-phase-num = ; motor-phase0-gpio = ; //对应 IN 1,高电平有效 motor-phase1-gpio = ; //对应 IN 2 motor-phase2-gpio = ; //对应 IN 3 motor-phase3-gpio = ; //对应 IN 4 motor-step-num = ; /* table index : b'(phase3 phase2 phase1 phase0) */ motor-cw-table = /bits/ 8 ; motor-ccw-table = /bits/ 8 ; motor-phase-udelay = ; motor-step-mdelay = ; status = "okay"; };4.2 驱动实现
- 全志H713平台已内置此驱动。
static void motor_set_phase(struct device *dev, int *gpios, int num, int phases, int delay) { int i; int value; for (i = 0; i > i) & 0x01; dev_dbg(dev, "set gpio %d value %d\n", gpios[i], value); gpio_set_value(gpios[i], value); udelay(delay);// dts:motor-phase-udelay } } static void motor_set_stop(struct device *dev, int *gpios, int num) { int i; for (i = 0; i dir) { case MOTOR_DIR_CW: phase_table = motor->cw_table;//采用正转相位参数表,共8个 break; case MOTOR_DIR_CCW: phase_table = motor->ccw_table;//采用反转相位参数表,共8个 break; default: dev_err(motor->dev, "motor run step dir_%d error\n", data->dir); return -EINVAL; } //驱动steps for (i = 0; i cycle; i++) { for (j = 0; j step_num; j++) { dev_dbg(motor->dev, "cycle_%d set motor phase 0x%x\n", i, phase_table[j]); motor_set_phase(motor->dev, motor->phase_gpios, \ motor->phase_num, phase_table[j], motor->phase_udelay); mdelay(motor->step_mdelay); } } //驱动完成,停止 motor_set_stop(motor->dev, motor->phase_gpios, motor->phase_num); return 0; }五、测试方法
- 全志H713平台已内置此驱动。
5.1 查看驱动加载情况
- motor_24byj48: probe success
console:/ # dmesg | grep motor [ 0.326672] motor linux driver init ok (Version 1.0.1) [ 0.326804] motor limiter linux driver init ok (Version 1.0.1) [ 0.655092] motor-control motor_24byj48: motor-phase-num=4 [ 0.661990] motor-control motor_24byj48: motor-step-num=8 [ 0.668789] motor-control motor_24byj48: motor-phase-udelay=5 [ 0.675967] motor-control motor_24byj48: motor-step-mdelay=2 [ 0.683157] motor-control motor_24byj48: motor-phase-num 4 [ 0.683161] motor-control motor_24byj48: motor-step-num 8 [ 0.683169] motor-control motor_24byj48: motor-cw-table [ 0.683176] motor-control motor_24byj48: motor-ccw-table [ 0.683533] motor-control motor_24byj48: probe success console:/ #
5.2 测试命令
5.2.1 正走100步
console:/sys/devices/platform/motor_24byj48 # echo 1,100 > motor_ctrl
5.2.2 逆走100步
console:/sys/devices/platform/motor_24byj48 # echo 2,100 > motor_ctrl
六、篇尾
本人从事android智能电视、投影(DLP、LCD)相关开发已有十余年,熟悉从board bringup开始,到app的全栈开发,从事过MTK、amlogic、全志、RK、高通、海奇等芯片的APP、BSP开发。目前主要工作主要集中在全志、海奇的Soc平台的技术支持工作!圈子很小,无论您是在校生、应届生、或者业内人士,有需要的多多交流,喜欢文章的朋友可以点个收藏、关注~!
- motor_24byj48: probe success
- 全志H713平台已内置此驱动。
- 全志H713平台已内置此驱动。
- board.dts 增加如下配置,同时将其余用到PC 5,6,8,9的地方做disabled处理,避免冲突
-
- 缺开发板,方法和代码
- 香橙派Z3 1G DDR







