点云配准
完整代码:https://github.com/kang-0909/point-cloud-registration/tree/main,记得给个star~
实验目标
- 任务一:将两个形状、大小相同的点云进行配准,进而估计两个点云之间的位姿。
- 任务二:将一些列深度图反向投影得到点云,经过配准后,得到每个深度图之间的位姿变换,并将相应的点云融合到一起。
编译运行环境
项目 Python3 编写,实现 RANSAC 配准和 ICP 配准,用到 open3d 和 numpy 库。运行 python main.py src.ply tgt.ply save_path.ply ,读取源点云 src.ply,目标点云 tgt.ply,保存路径 save_path.ply。会显示三张图,分别为原始点云(源点云用红色标注,目标点云用绿色标注)、粗配准结果、精配准结果。
算法设计
任务一和任务二的主要思路一致,都是先对点云进行降采样、滤波后计算点云特征信息(包括法向量、特征直方图、以及后续特征匹配需要的若干特征),再利用提取的特征使用 RANSAC 的方法进行粗配准,最后使用 ICP 的方法进行精配准。
特征提取
【PCL学习笔记】之快速点特征直方图FPFH - pcl::FPFHSignature33 - Eba_
使用 FPFH(Fast Point Feature Histogram)算法。PFH(Point Feature Histogram)算法提取没给点邻域内两两点对间几何特征(一些角度信息),绘制直方图。FPFH 保留了 PFH 的大部分信息,但忽略了相邻点之间的计算,而是按照距离的反比将一个邻域内的点的直方图加权得到 33 维向量,效率更高。尝试了使用 PCA 进行降维以提高后续特征匹配速度,发现作用不大,遂舍弃。
粗配准
使用 RANSAC 的方法,总而言之就是对于源点云中的三个点,去“蒙”他们和目标点云中的那几个点相对应,然后计算变换矩阵,检验其优劣。简要流程如下:
- 在源点云中随机选择 3 个点。
- 分别查找他们在目标点云中特征向量最接近的点。这里的“接近”是欧式距离意义下的,查询数据结构使用 KD 树。
- 计算两个三角形之间的变换矩阵。其实就是按照 ICP 精配准的过程,求最小二乘法意义下的最优变换矩阵。
- 求出源点云在此变换之后的点云,计算其与目标点云的重合度(定义为源点云中阈值半径内存在目标点的点的个数)。
- 回到1,重复若干次,维护并返回重合度最高的变换。
实际编码中,由于 4 中 KD 树查询速度比较慢(33 维空间中接近于 O ( n ) O(n) O(n)),因提高在 1、2 中选择三角形对的质量是一个好的做法。这里三角形对的质量一是指他们匹配的可能性,二是通过他们计算出的变换矩阵是否准确。可以想到的方法有很多,比如三角形的边不能太短、两个三角形的对应边长不能差太多、优先选择特征向量远离均值的点等等。我的实现中采用了前两种。此外,在降采样后的点云上配准也可以提高效率。
精配准
【点云精配准】Iterative Closest Point(ICP)- Forrest Ding
具体推导过程就不赘述了。
深度图融合
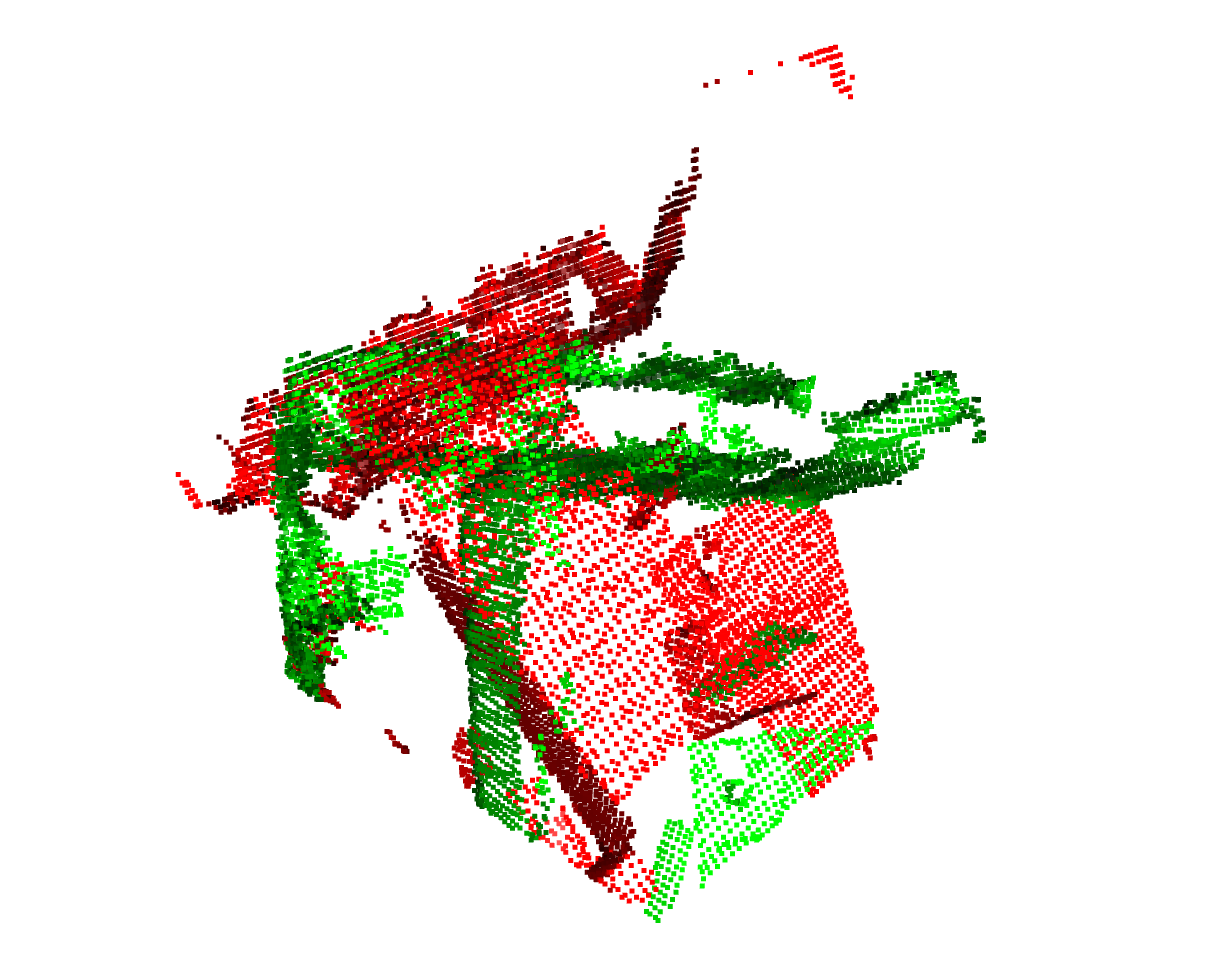
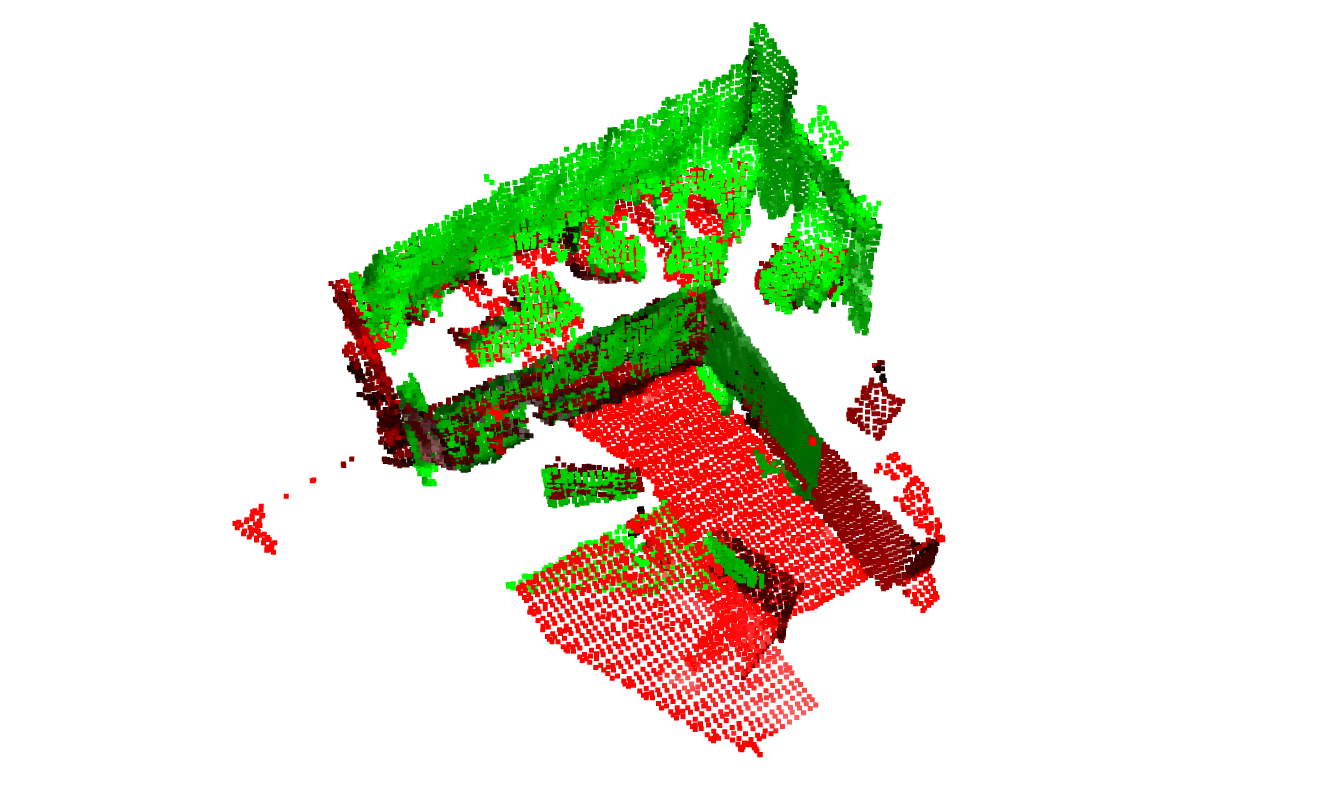
上面的算法可以较好地完成对形状、大小相同的点云配准。但是,如果直接应用在深度图上,会出现匹配不上的问题(下面为 single-depth 匹配结果的俯视图):
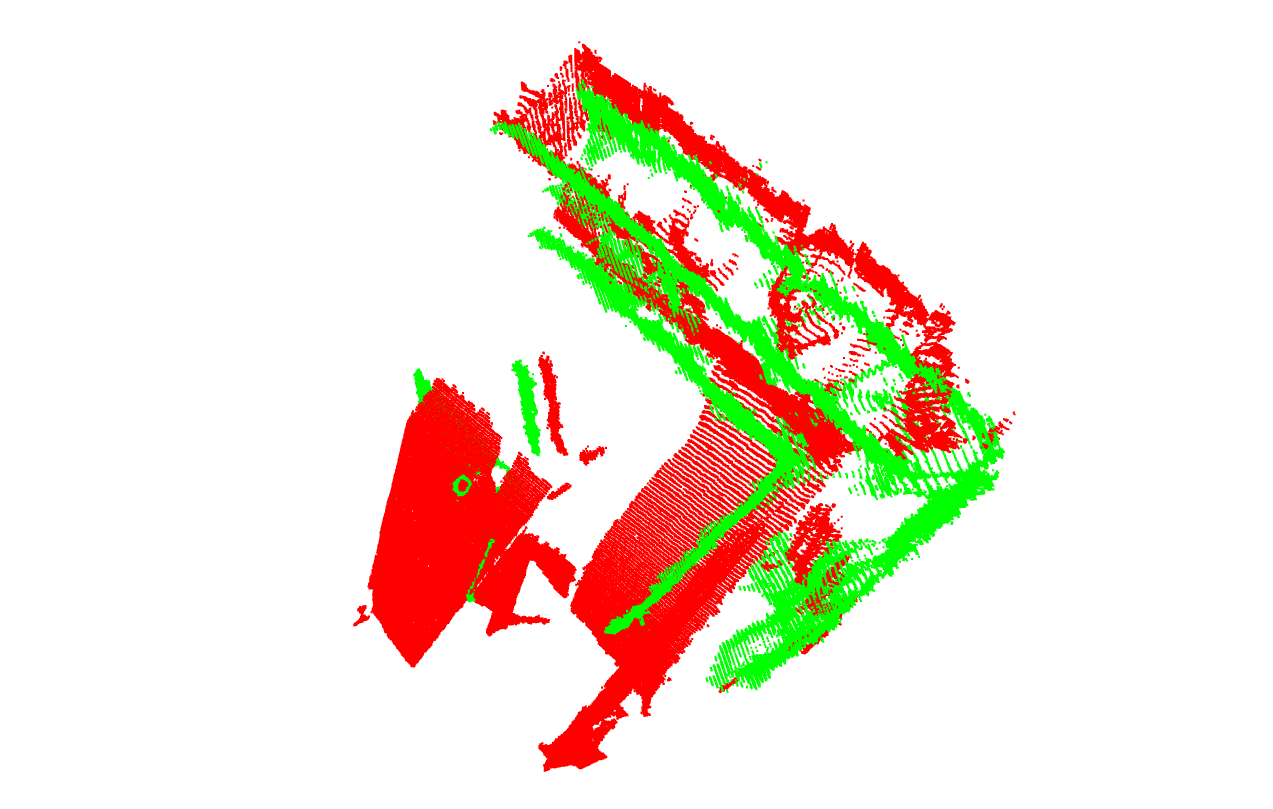
这是因为 ICP 为每个源点云中的点,都从目标点云中找到一个距离最近的点和它匹配。但在深度图中,两个点云存在很多点本来就是不匹配的。如果强行令他们匹配,那么在最小二乘法的意义下最优解就是上图这样,一个点云被移动到了另一个的“中央”位置。
改进方法就是,对于源点云中的一个点,如果在目标点云中不存在和它的距离小于某个阈值的点,那么在此次迭代中就不考虑该点。同时,这个阈值随着迭代的进行不断减小的(有下限),这样就使得配准越来越精细。
关键代码
RANSAC
实现中还涉及两个细节。
一是匹配阈值设为多大合适?由于不同的数据具有不同的尺寸,我们想要得到点云(在某个表面上的)平均距离。这里使用了一种非常暴力的方法,考虑体素下采样 oldPcd.voxel_down_sample(voxel_size),采样到一定程度后,点云密集处的平均距离就是 voxel_size。因此将 RANSAC 的匹配阈值设置为 2.5 * voxel_size。
二是如何判断两个三角形的差距?代码中如果对应边长度之差大于 lengthThreshold * 长度平均值。
这样,50 次有效采样就能计算出很好的转移矩阵。从下面的效果可以看出,即使是粗配准的效果就很好了。
def RANSAC(): maxCount = 0 jisuan=0 j = 0 print("RANSACing...") while True: j += 1 // 随机选取三个点 srcCorr = random.sample(range(srcNum), 3) // 如果某两个点距离太近,舍弃 if not notTooClose3([srcPoints[x] for x in srcCorr]): continue // KD 树特征匹配 tgtCorr = [] for id in srcCorr: k, idx, dis2 = tgtFpfhKDT.search_knn_vector_xd(srcFpfh[id], knn=1) tgtCorr.append(random.choice(idx[0])) // 如果两个三角形差距太大,也舍弃 if True in [farAway(srcPoints[i[0]] - srcPoints[j[0]], tgtPoints[i[1]] - tgtPoints[j[1]]) for i in zip(srcCorr, tgtCorr) for j in zip(srcCorr, tgtCorr)]: continue jisuan += 1 // 得到变换矩阵 R, T = calculateTrans(np.array([srcPoints[i] for i in srcCorr]), np.array([tgtPoints[i] for i in tgtCorr])) A = np.transpose((R @ srcPoints.T) + np.tile(T, (1, srcNum))) //计算匹配数 count = 0 for point in range(0, srcNum, 1): k, idx, dis2 = tgtKDT.search_hybrid_vector_3d(A[point], radius=fitThreshold, max_nn=1) count += k // 更新最大匹配 if count > maxCount: maxCount = count bestR, bestT = R, T if jisuan > 50 and j > 1000: break print("RANSAC calculated %d times, maximum matches: %d" % (jisuan, maxCount)) return bestR, bestTICP
def ICP(src, tgt): limit = fitThreshold retR = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]]) retT = np.array([[0], [0], [0]]) trace = [] for _ in range(400): tgtCorr = [] srcCorr = [] // 筛选距离近的点对 for point in src: k, idx, dis2 = tgtKDT.search_knn_vector_3d(point, knn=1) if dis2[0] 50 and len(set([x[1] for x in trace[-20:]])) == 1: break print("ICP trace is:", trace) return retR, retT效果
在所有的测试数据中,算法都能够取得令人满意的结果,这里选择 airplane、person 以及 single-depth 三组数据进行展示。另外,如果直接对原始数据进行配准,会导致源点云和目标点云完全重合,只会显示单一的颜色,不利于观察效果。因此算法对每组数据都做了适量的下采样之后进行配准,因此能够看出是两个点云匹配的结果。
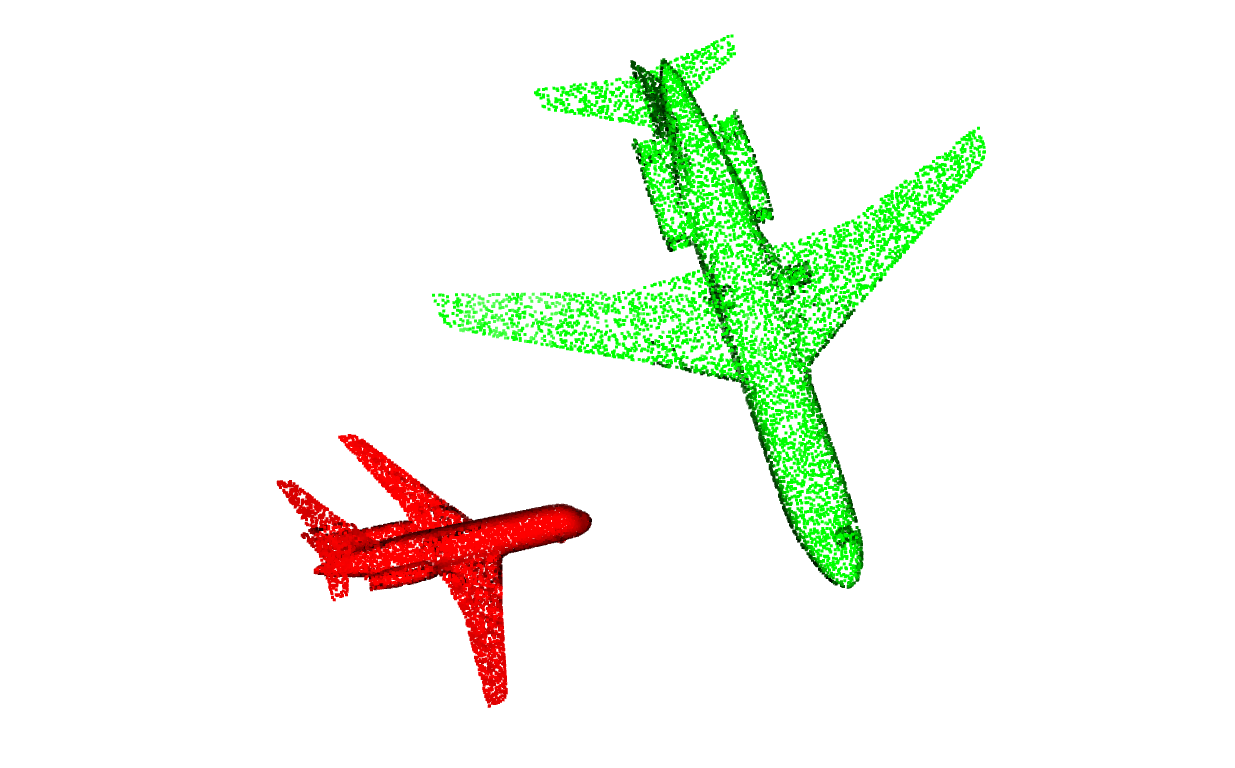
airplane:
配准前:
粗配准:
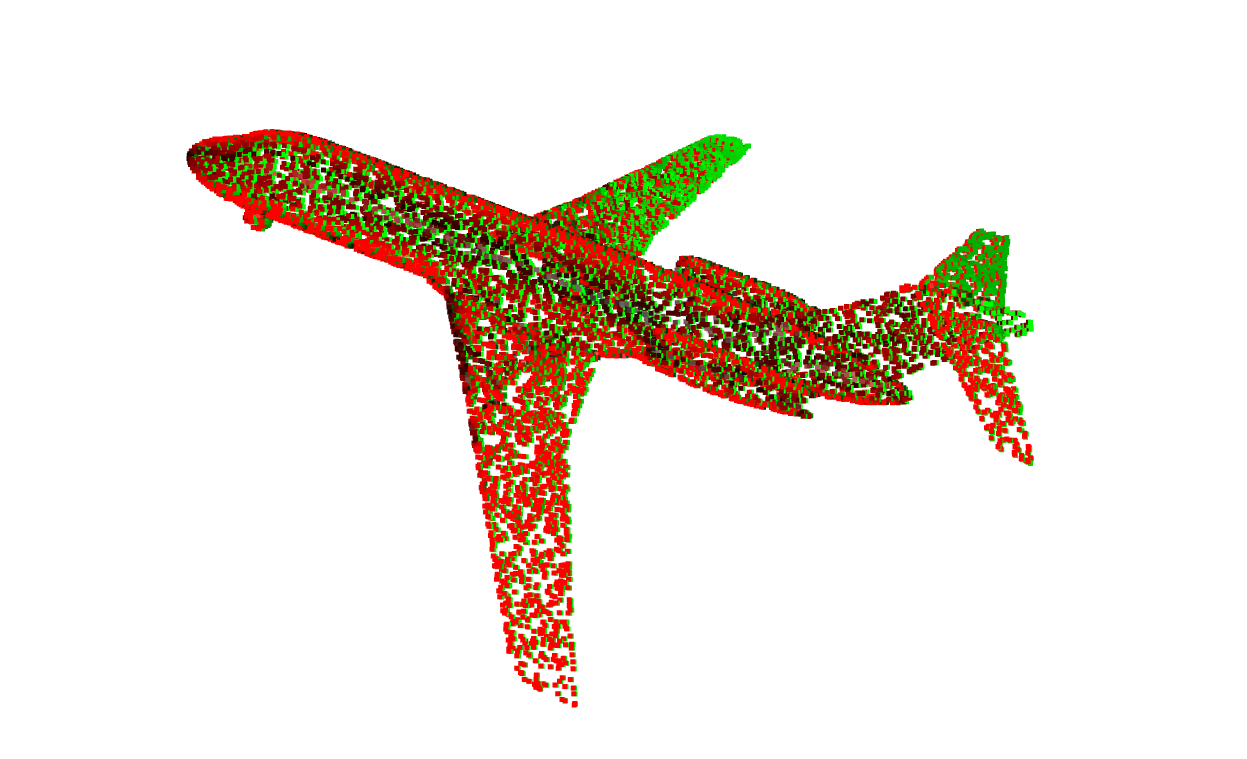
精配准:

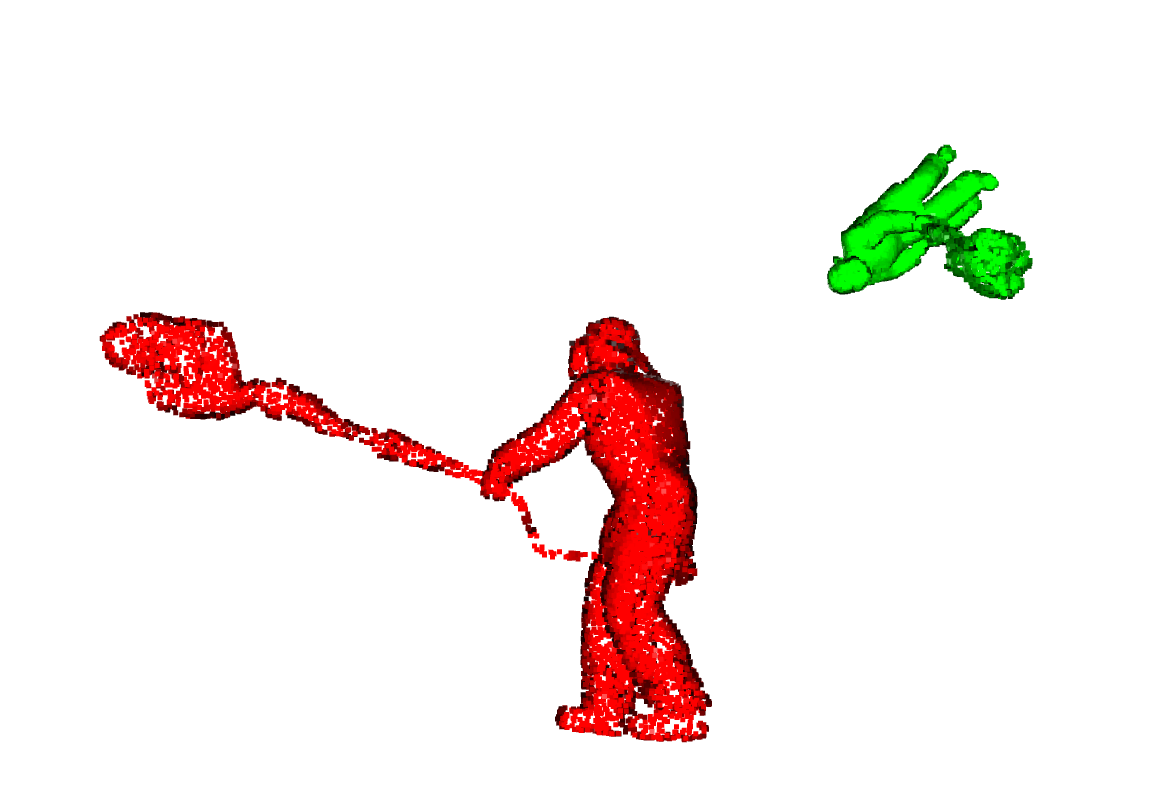
person:
配准前:
粗配准:
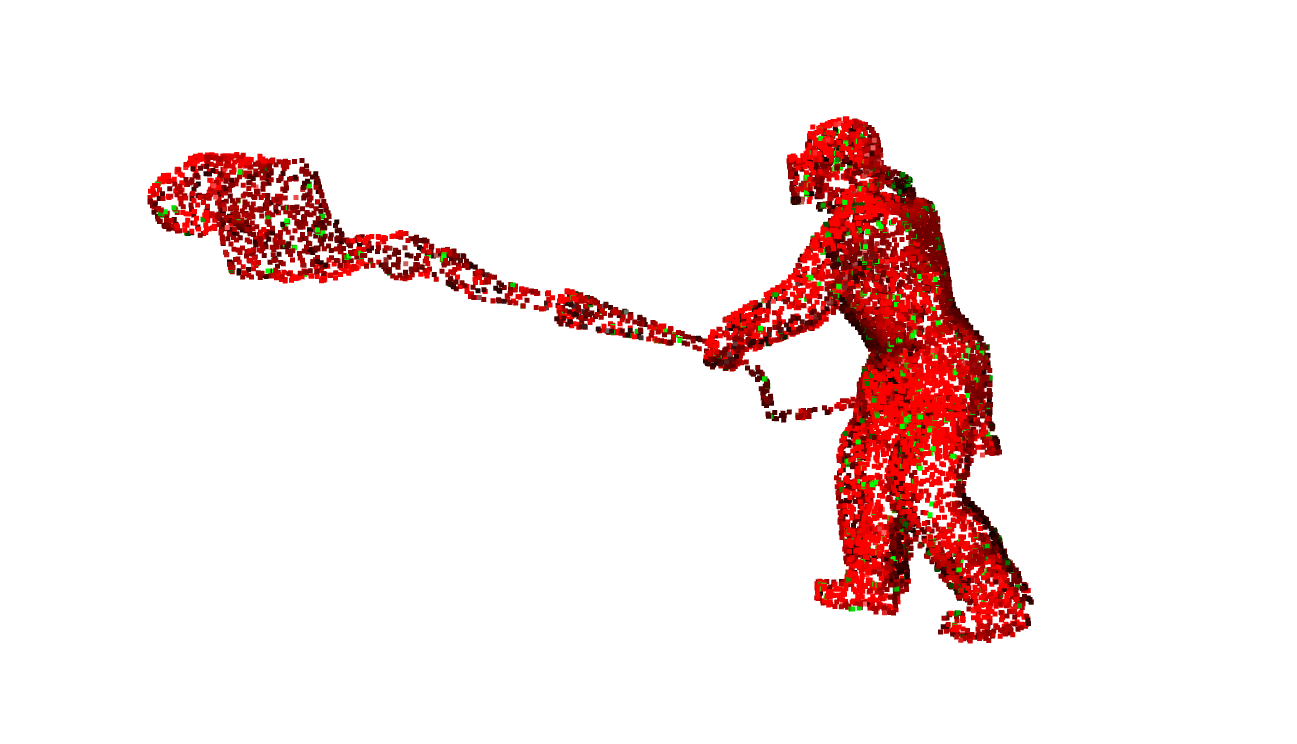
精配准:

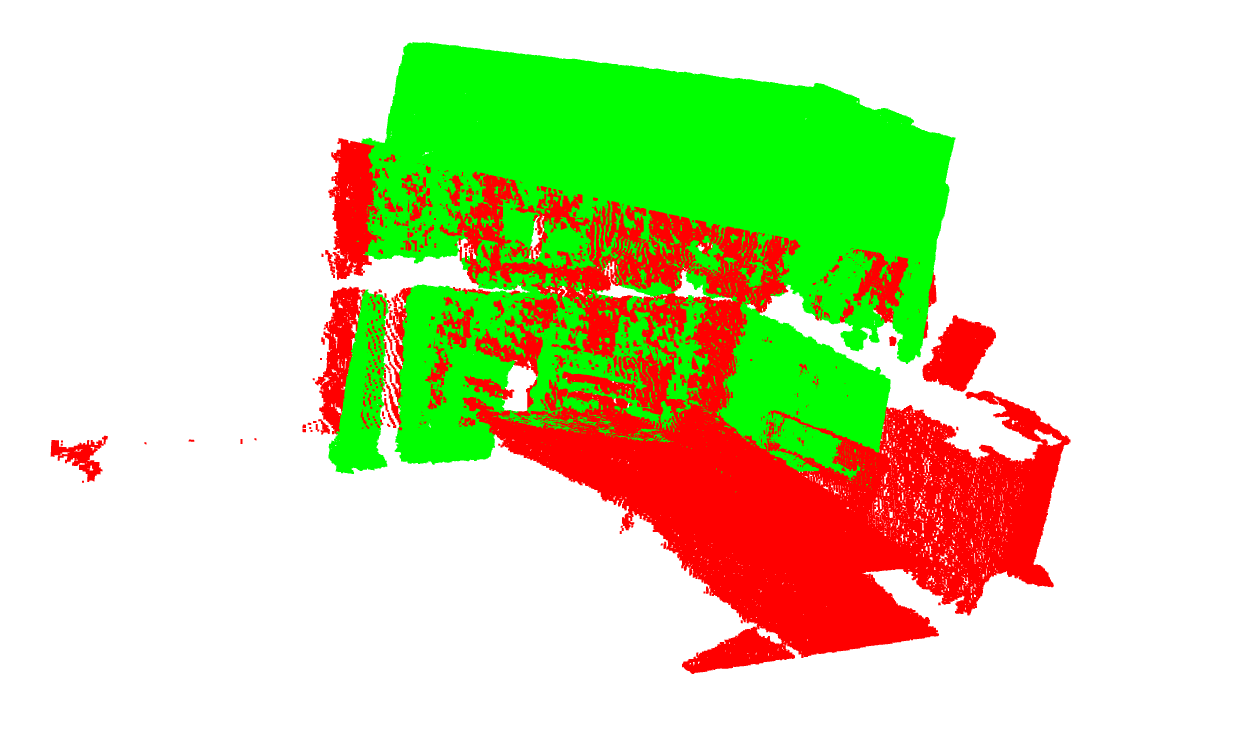
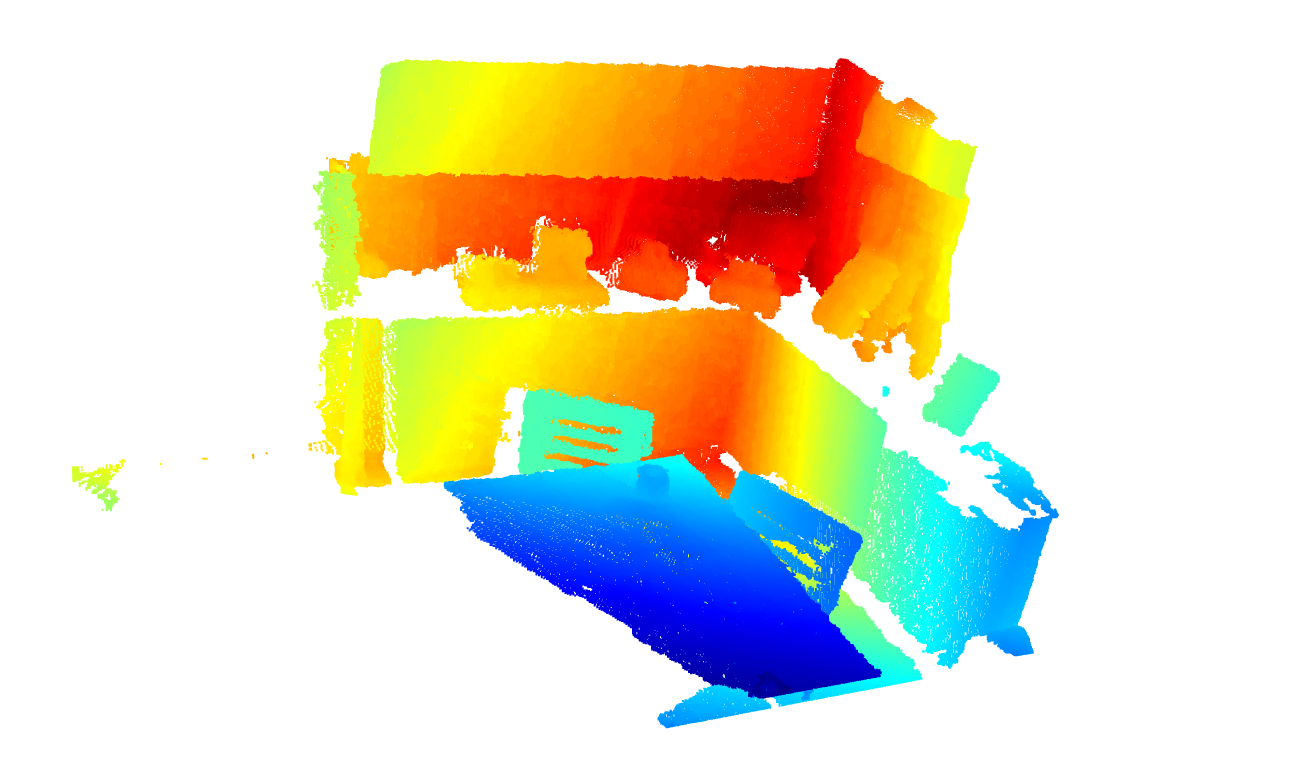
single-depth:
配准前(降采样后):
粗配准(降采样后):
精配准: