

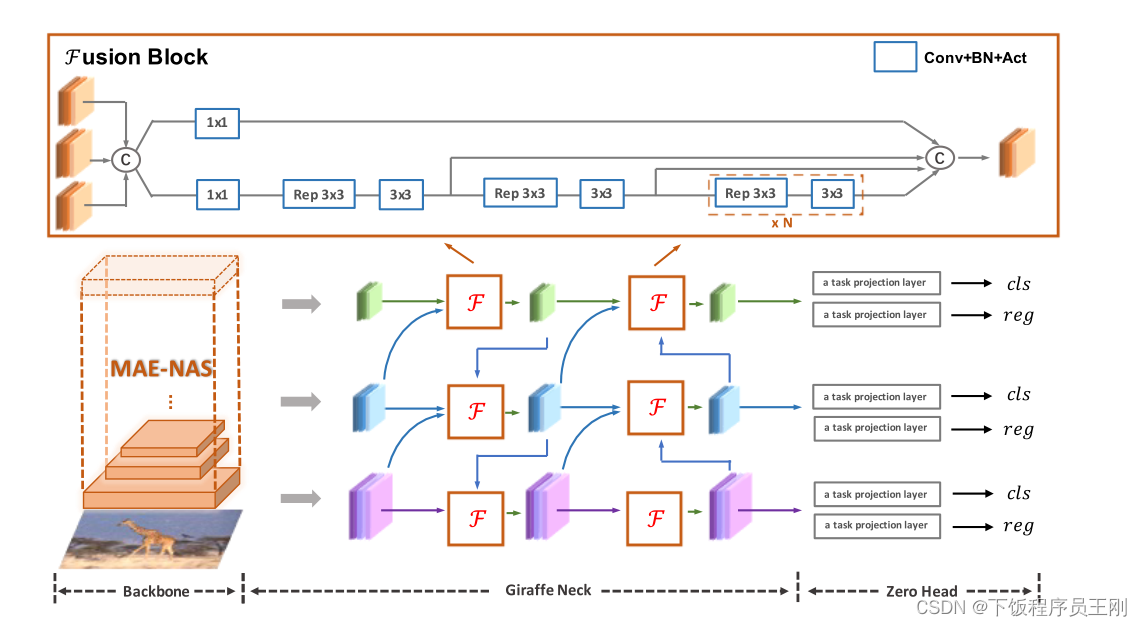
这个图是有点问题的,在GiraffeNeckV2代码中只有了5个Fusion Block(图中有6个)
https://Github.com/tinyvision/DAMO-YOLO/blob/master/damo/base_models/necks/giraffe_fpn_btn.py
代码中只有5个CSPStage
所以我自己画了一个总体图,在github上提了个issue,得到了原作者的肯定
I think the pictures in your paper are not rigorous in several places · Issue #91 · tinyvision/DAMO-YOLO · GitHub
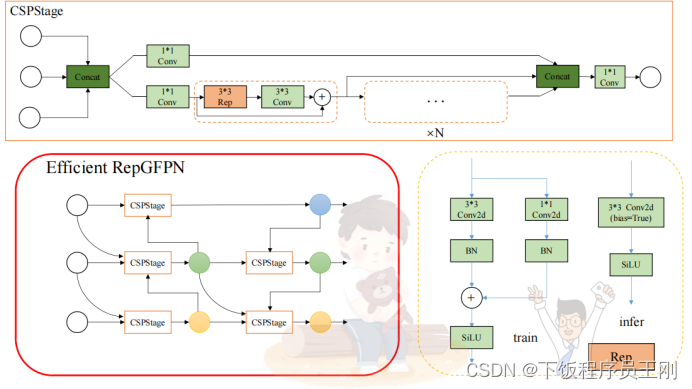
想要看懂Neck部分,只需要看懂Fusion Block在做什么就行了,其他部分和PAN差不太多
class CSPStage(nn.Module):
def __init__(self,
block_fn,
ch_in,
ch_hidden_ratio,
ch_out,
n,
act='swish',
spp=False):
super(CSPStage, self).__init__()
split_ratio = 2
ch_first = int(ch_out // split_ratio)
ch_mid = int(ch_out - ch_first)
self.conv1 = ConvBNAct(ch_in, ch_first, 1, act=act)
self.conv2 = ConvBNAct(ch_in, ch_mid, 1, act=act)
self.convs = nn.Sequential()
next_ch_in = ch_mid
for i in range(n):
if block_fn == 'BasicBlock_3x3_Reverse':
self.convs.add_module(
str(i),
BasicBlock_3x3_Reverse(next_ch_in,
ch_hidden_ratio,
ch_mid,
act=act,
shortcut=True))
else:
raise NotImplementedError
if i == (n - 1) // 2 and spp:
self.convs.add_module(
'spp', SPP(ch_mid * 4, ch_mid, 1, [5, 9, 13], act=act))
next_ch_in = ch_mid
self.conv3 = ConvBNAct(ch_mid * n + ch_first, ch_out, 1, act=act)
def forward(self, x):
y1 = self.conv1(x)
y2 = self.conv2(x)
mid_out = [y1]
for conv in self.convs:
y2 = conv(y2)
mid_out.append(y2)
y = torch.cat(mid_out, axis=1)
y = self.conv3(y)
return y
以上是CSPStage的代码,要想看懂,我们得先看懂ConvBNAct、BasicBlock_3x3_Reverse这两个类
class ConvBNAct(nn.Module):
"""A Conv2d -> Batchnorm -> silu/leaky relu block"""
def __init__(
self,
in_channels,
out_channels,
ksize,
stride=1,
groups=1,
bias=False,
act='silu',
norm='bn',
reparam=False,
):
super().__init__()
# same padding
pad = (ksize - 1) // 2
self.conv = nn.Conv2d(
in_channels,
out_channels,
kernel_size=ksize,
stride=stride,
padding=pad,
groups=groups,
bias=bias,
)
if norm is not None:
self.bn = get_norm(norm, out_channels, inplace=True)
if act is not None:
self.act = get_activation(act, inplace=True)
self.with_norm = norm is not None
self.with_act = act is not None
def forward(self, x):
x = self.conv(x)
if self.with_norm:
x = self.bn(x)
if self.with_act:
x = self.act(x)
return x
def fuseforward(self, x):
return self.act(self.conv(x))
ConvBNAct还是很好看懂的,Conv +BN + SiLU就完事了(也可用别的激活函数,文章用SiLU)
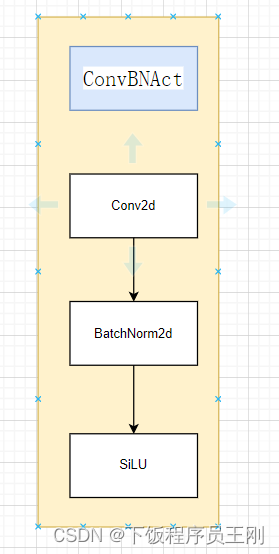
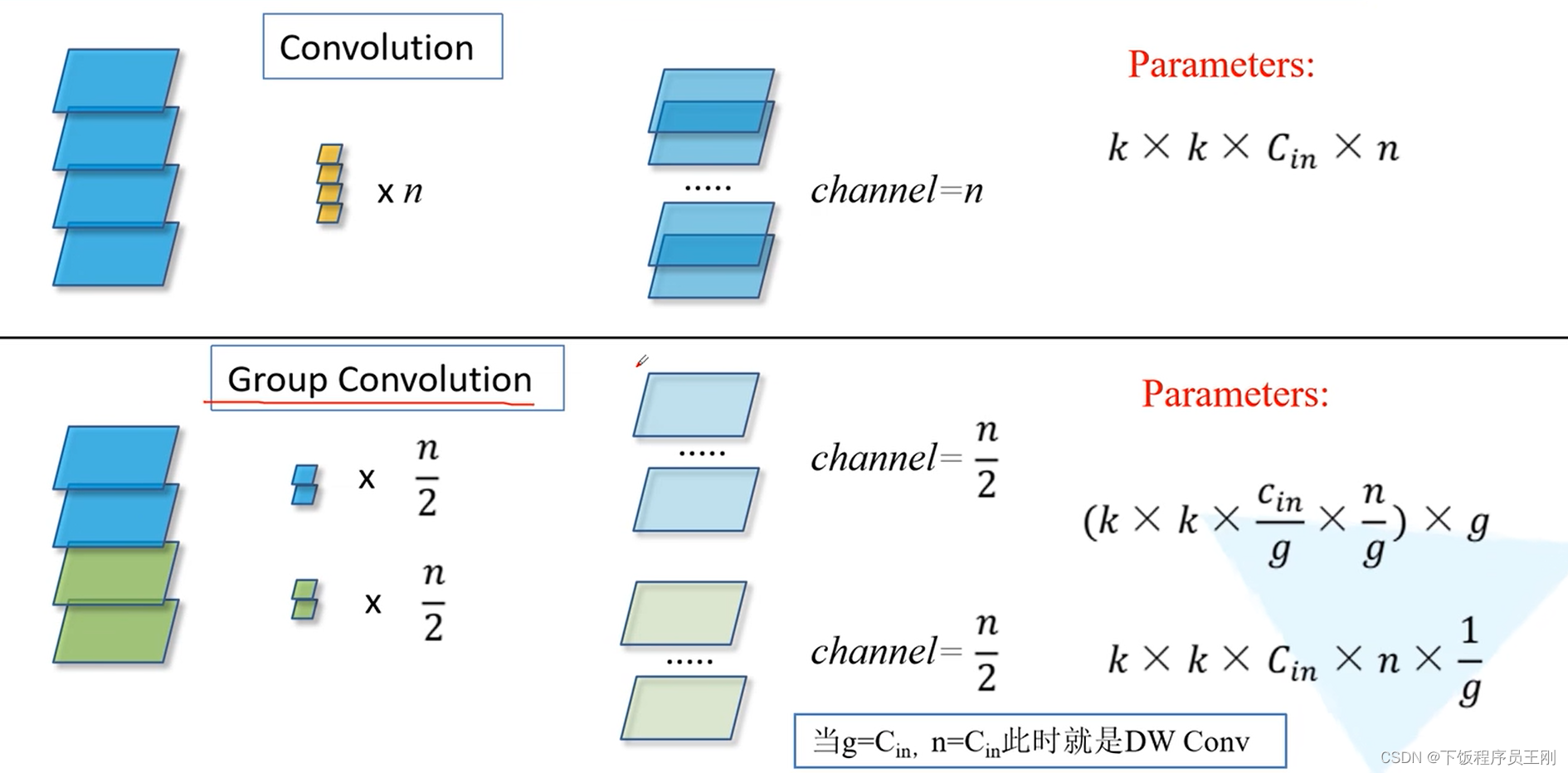
如果设置了groups参数就变成了组卷积了
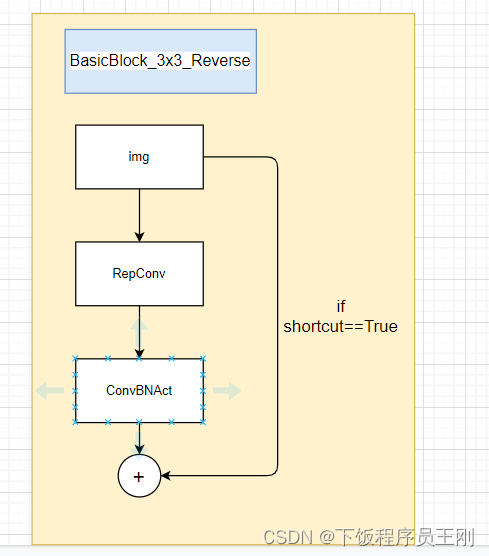
class BasicBlock_3x3_Reverse(nn.Module):
def __init__(self,
ch_in,
ch_hidden_ratio,
ch_out,
act='relu',
shortcut=True):
super(BasicBlock_3x3_Reverse, self).__init__()
assert ch_in == ch_out
ch_hidden = int(ch_in * ch_hidden_ratio)
self.conv1 = ConvBNAct(ch_hidden, ch_out, 3, stride=1, act=act)
self.conv2 = RepConv(ch_in, ch_hidden, 3, stride=1, act=act)
self.shortcut = shortcut
def forward(self, x):
y = self.conv2(x)
y = self.conv1(y)
if self.shortcut:
return x + y
else:
return y
要看懂BasicBlock_3x3_Reverse这个类,就得了解RepConv类,这个类就是根据RepVGG网络的RepVGGBlock改的
class RepConv(nn.Module):
'''RepConv is a basic rep-style block, including training and deploy status
Code is based on https://github.com/DingXiaoH/RepVGG/blob/main/repvgg.py
'''
def __init__(self,
in_channels,
out_channels,
kernel_size=3,
stride=1,
padding=1,
dilation=1,
groups=1,
padding_mode='zeros',
deploy=False,
act='relu',
norm=None):
super(RepConv, self).__init__()
self.deploy = deploy
self.groups = groups
self.in_channels = in_channels
self.out_channels = out_channels
assert kernel_size == 3
assert padding == 1
padding_11 = padding - kernel_size // 2
if isinstance(act, str):
self.nonlinearity = get_activation(act)
else:
self.nonlinearity = act
if deploy:
self.rbr_reparam = nn.Conv2d(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding,
dilation=dilation,
groups=groups,
bias=True,
padding_mode=padding_mode)
else:
self.rbr_idEntity = None
self.rbr_dense = conv_bn(in_channels=in_channels,
out_channels=out_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding,
groups=groups)
self.rbr_1x1 = conv_bn(in_channels=in_channels,
out_channels=out_channels,
kernel_size=1,
stride=stride,
padding=padding_11,
groups=groups)
def forward(self, inputs):
'''Forward process'''
if hasattr(self, 'rbr_reparam'):
return self.nonlinearity(self.rbr_reparam(inputs))
if self.rbr_identity is None:
id_out = 0
else:
id_out = self.rbr_identity(inputs)
return self.nonlinearity(
self.rbr_dense(inputs) + self.rbr_1x1(inputs) + id_out)
def get_equivalent_kernel_bias(self):
kernel3x3, bias3x3 = self._fuse_bn_tensor(self.rbr_dense)
kernel1x1, bias1x1 = self._fuse_bn_tensor(self.rbr_1x1)
kernelid, biasid = self._fuse_bn_tensor(self.rbr_identity)
return kernel3x3 + self._pad_1x1_to_3x3_tensor(
kernel1x1) + kernelid, bias3x3 + bias1x1 + biasid
def _pad_1x1_to_3x3_tensor(self, kernel1x1):
if kernel1x1 is None:
return 0
else:
return torch.nn.functional.pad(kernel1x1, [1, 1, 1, 1])
def _fuse_bn_tensor(self, branch):
if branch is None:
return 0, 0
if isinstance(branch, nn.Sequential):
kernel = branch.conv.weight
running_mean = branch.bn.running_mean
running_var = branch.bn.running_var
gamma = branch.bn.weight
beta = branch.bn.bias
eps = branch.bn.eps
else:
assert isinstance(branch, nn.BatchNorm2d)
if not hasattr(self, 'id_tensor'):
input_dim = self.in_channels // self.groups
kernel_value = np.zeros((self.in_channels, input_dim, 3, 3),
dtype=np.float32)
for i in range(self.in_channels):
kernel_value[i, i % input_dim, 1, 1] = 1
self.id_tensor = torch.from_numpy(kernel_value).to(
branch.weight.device)
kernel = self.id_tensor
running_mean = branch.running_mean
running_var = branch.running_var
gamma = branch.weight
beta = branch.bias
eps = branch.eps
std = (running_var + eps).sqrt()
t = (gamma / std).reshape(-1, 1, 1, 1)
return kernel * t, beta - running_mean * gamma / std
def switch_to_deploy(self):
if hasattr(self, 'rbr_reparam'):
return
kernel, bias = self.get_equivalent_kernel_bias()
self.rbr_reparam = nn.Conv2d(
in_channels=self.rbr_dense.conv.in_channels,
out_channels=self.rbr_dense.conv.out_channels,
kernel_size=self.rbr_dense.conv.kernel_size,
stride=self.rbr_dense.conv.stride,
padding=self.rbr_dense.conv.padding,
dilation=self.rbr_dense.conv.dilation,
groups=self.rbr_dense.conv.groups,
bias=True)
self.rbr_reparam.weight.data = kernel
self.rbr_reparam.bias.data = bias
for para in self.parameters():
para.detach_()
self.__delattr__('rbr_dense')
self.__delattr__('rbr_1x1')
if hasattr(self, 'rbr_identity'):
self.__delattr__('rbr_identity')
if hasattr(self, 'id_tensor'):
self.__delattr__('id_tensor')
self.deploy = True

RepConv的特点是结构重参数化,训练时采用三条分支,推理时将三个分支融合在一起,大大减少了推理时间(建议看看RepVGG的讲解视频),我图画得太丑了

RepConv采用的两分支的结构(a)

其他细节有缘再更,代码不难,慢慢看完全能懂。有写的不对的地方请见谅







