

本文讲解线性二次优化器LQR的原理和C++的代码实现,同时在CARLA-ROS联合仿真环境验证算法效果。
文章目录
- 前言
- 一、LQR的原理
- 1.1 一个小例子
- 1.2 黎卡提方程求解LQR问题
- 二、车辆动力学模型
- 2.1 自行车模型
- 2.2 基于LQR的轨迹追踪
- 三、LQR代码
- 总结
前言
本文讲解线性二次优化器LQR的原理和C++的代码实现,同时在CARLA-ROS联合仿真环境验证算法效果
一、LQR的原理
1.1 一个小例子
举一个通俗易懂的关于LQR原理的小例子,假设从家里要去公司,现在有如下几种交通方式以及花费的时间和交通成本如下表所示:
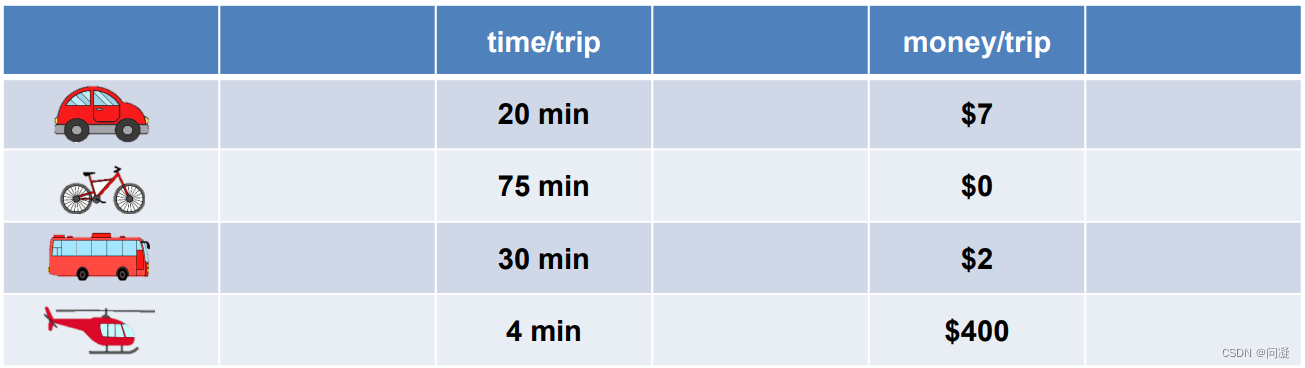 那么哪种方式是最佳的方式去公司呢?我们定义代价Cost J = Q * time + R * money;
那么哪种方式是最佳的方式去公司呢?我们定义代价Cost J = Q * time + R * money;如果你认为时间比较重要,时间成本低相对来说总的成本就低的话,假设时间的成本权重为30,这里的30就是Q值,你可以认为是对时间的惩罚系数,或者是权重,目的就是让time小,而交通花费成本为1,意思就是Q的值为1,相对于时间来说,金钱成本惩罚低;通过计算,我们可以得到四种出行方式的成本:
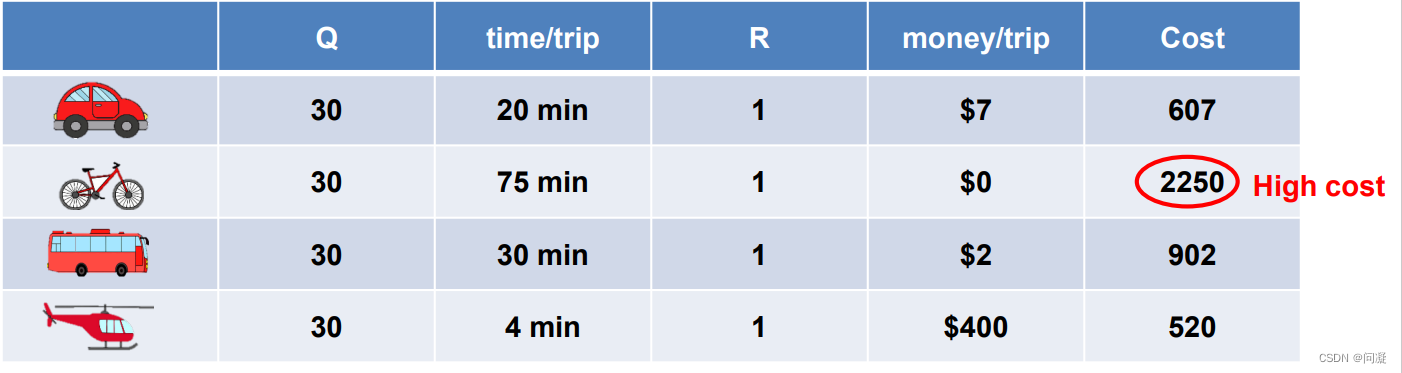 我们可以看到Q和R就是time和money的权重,而我们的目的就是优化代价函数COST,使其最优;
我们可以看到Q和R就是time和money的权重,而我们的目的就是优化代价函数COST,使其最优;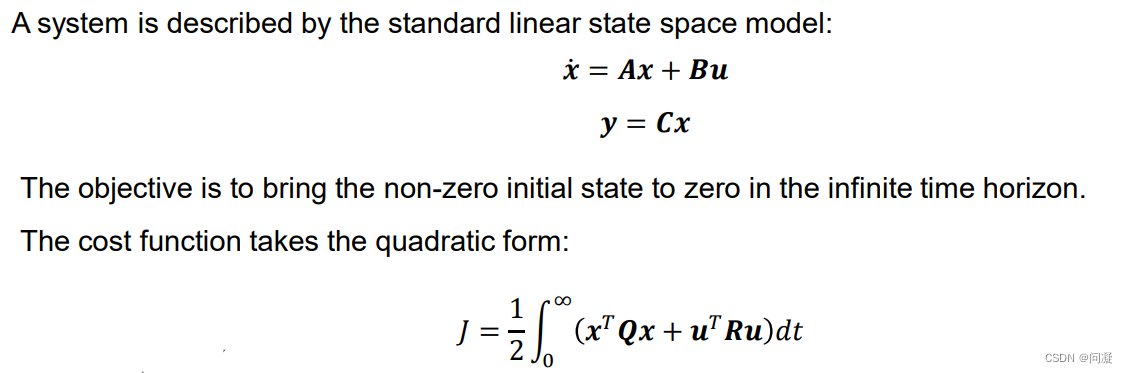
同理在LQR计算过程中,我们的目的就是是得到使代价函数最小的控制量和状态量;
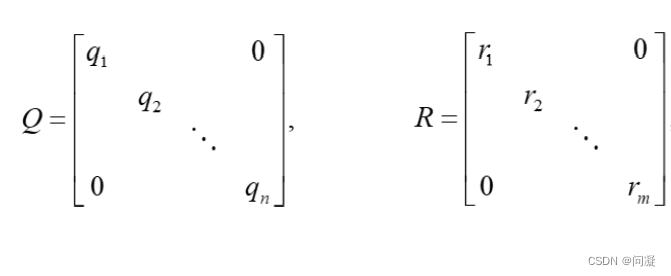
在上面的小例子中,LQR为一维的问题;在二维的LQR问题中,Q和R为矩阵,在Q矩阵中,如果q1比q2大就意味着第一个状态量x1比第二个状态量x2重要,在R矩阵,如果r1比r2大就意味着第一个控制量u1比第二个状态量u2重要。
1.2 黎卡提方程求解LQR问题
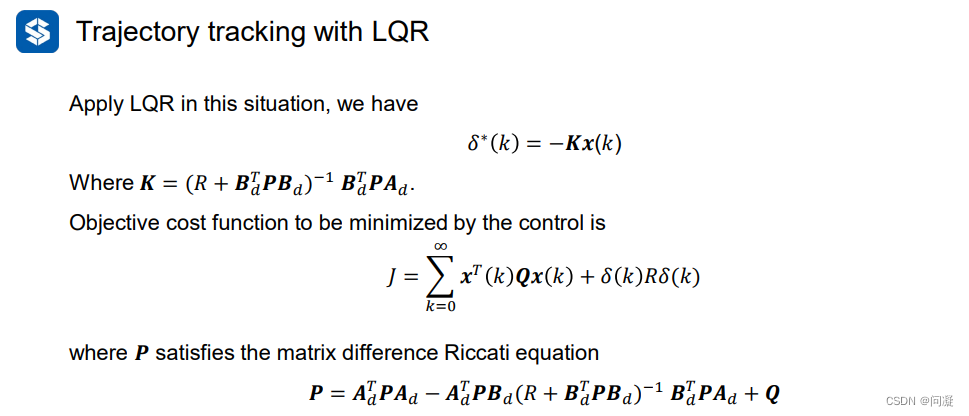
在LQR问题中,我们引入状态反馈u = - K * x,并把它带入到状态方程和损失函数中,得到如下的形式:
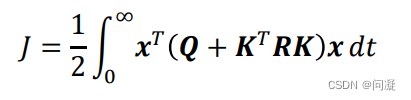
前面说过线性二次优化器LQR就是通过最小化损失函数来得到最佳控制量u的,现在我们来最小化损失函数J来求得最优控制量u*;
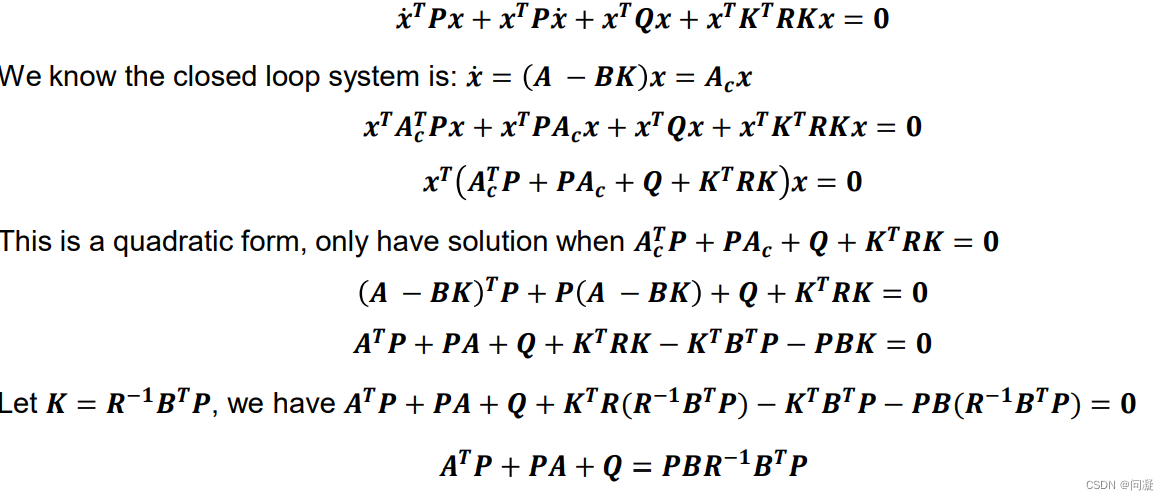
首先我们假设P矩阵为一个n * n的对称矩阵,并且假设xT * P * x的微分为-J,即:

我们把左边的d/dt(xTPx)展开,同时把右边的式子挪到左边来,对方程进行整理,同时假设K = R的逆矩阵乘以B矩阵的转置乘以P矩阵,最后得到了黎卡提方程,计算过程如下:
示例:pandas 是基于NumPy 的一种工具,该工具是为了解决数据分析任务而创建的。
二、车辆动力学模型
2.1 自行车模型
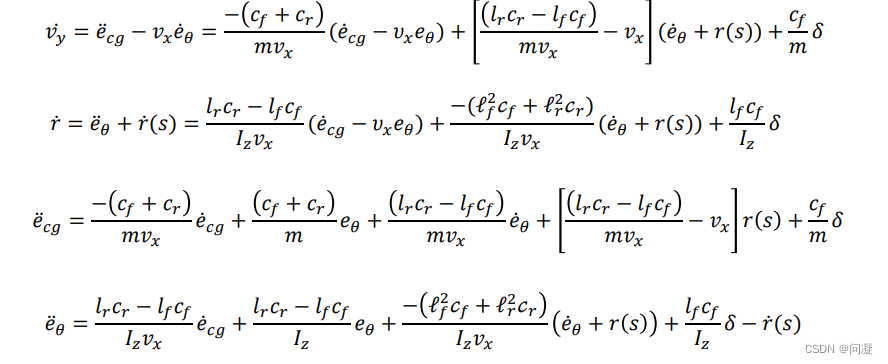
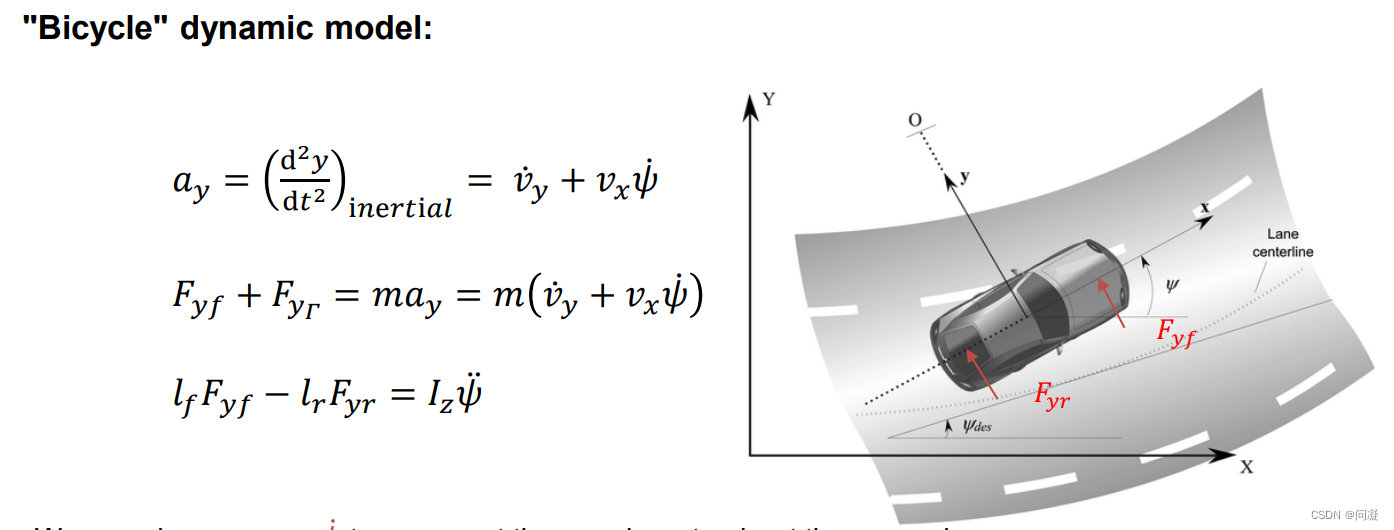 解释一下三个方程的由来:第一个方程式y轴方向的加速度等于y轴方向的加速度加上车辆的向心加速度,这里的vx * φ’,φ’就等于角速度,将角速度记为r,向心加速度等于(vx^2) / R,R为半径,而vx / R等于角速度也就是 φ’,所以向心加速度就等于vx * φ’;第二个方程是y轴方向的牛顿第二定律;第三个方程大家可能比较疑惑,这个其实是扭矩的计算公式,扭矩=力 * 力矩 = 转动惯量 * 角加速度;方程的左边是lf * Fyf - lr * Fyr,因为两个力是同方向的,所以扭矩是相反的,你可以这么认为,Fyr使车辆顺时针运动,Fyf使车辆逆时针运动,因此使lf * Fyf - lr * Fyr;而方程的右边是转动惯量Iz * 角加速度φ’‘,这样就看懂了第三个方程。
解释一下三个方程的由来:第一个方程式y轴方向的加速度等于y轴方向的加速度加上车辆的向心加速度,这里的vx * φ’,φ’就等于角速度,将角速度记为r,向心加速度等于(vx^2) / R,R为半径,而vx / R等于角速度也就是 φ’,所以向心加速度就等于vx * φ’;第二个方程是y轴方向的牛顿第二定律;第三个方程大家可能比较疑惑,这个其实是扭矩的计算公式,扭矩=力 * 力矩 = 转动惯量 * 角加速度;方程的左边是lf * Fyf - lr * Fyr,因为两个力是同方向的,所以扭矩是相反的,你可以这么认为,Fyr使车辆顺时针运动,Fyf使车辆逆时针运动,因此使lf * Fyf - lr * Fyr;而方程的右边是转动惯量Iz * 角加速度φ’‘,这样就看懂了第三个方程。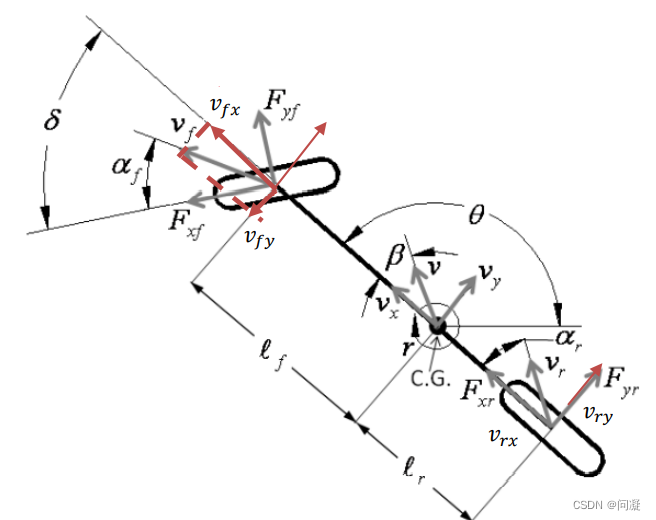
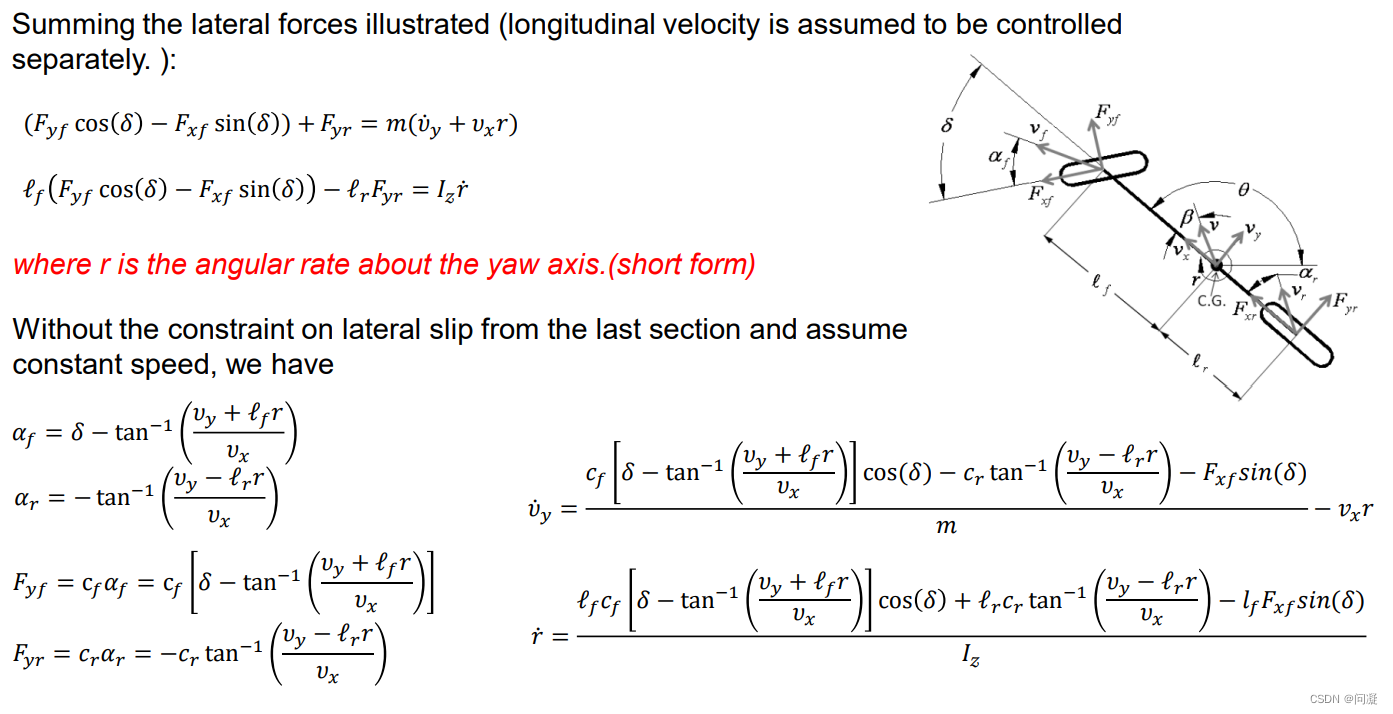
来解释一下自行车模型中要用到的参数,αf和αr为质心侧偏角,Fyf和Fyr为前轮和后轮受到的侧向力,θvf 和 θvr分别是vf和vr与Vfx以及Vrx的夹角,对上面三个方程中的后两个方程,将Fyf‘’和Fyr’带入方程,同时把侧偏角和侧向力的计算带入方程中,得到如下的方程:
 得到方程后,对一些量做近似,简化计算:
得到方程后,对一些量做近似,简化计算: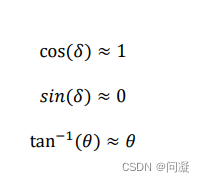
最终得到如下的形式:
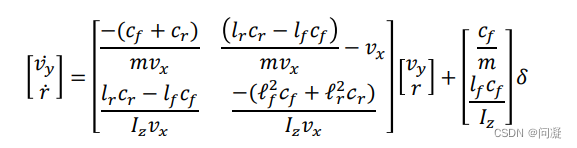
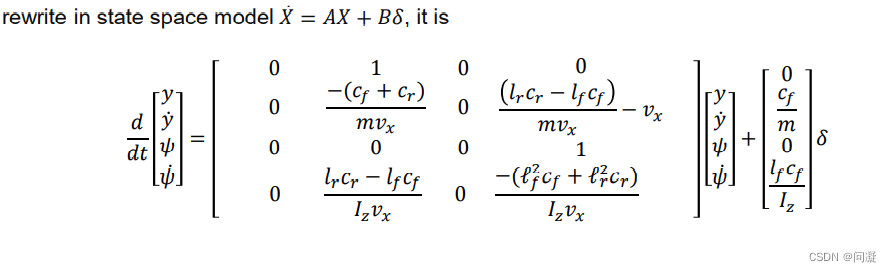
把坐标y和航向角φ也作为状态量,得到如下的状态方程:
2.2 基于LQR的轨迹追踪
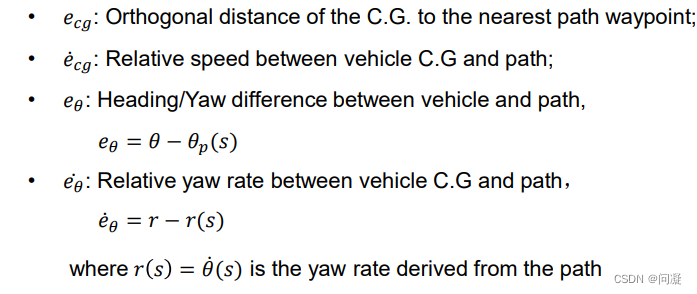
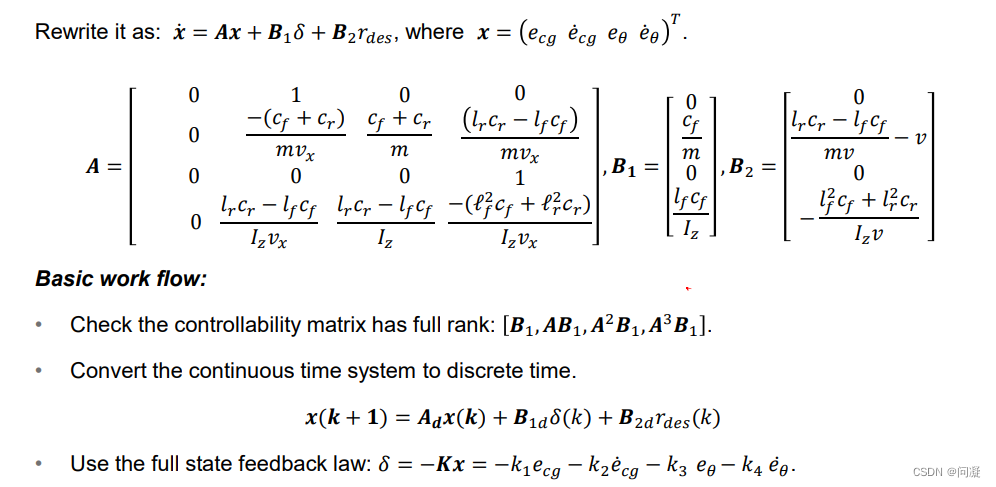
首先选择横向误差Wθ和航向角误差ecg以及这两个状态量的导数作为描述系统的状态,方向盘打的角度作为控制输入;
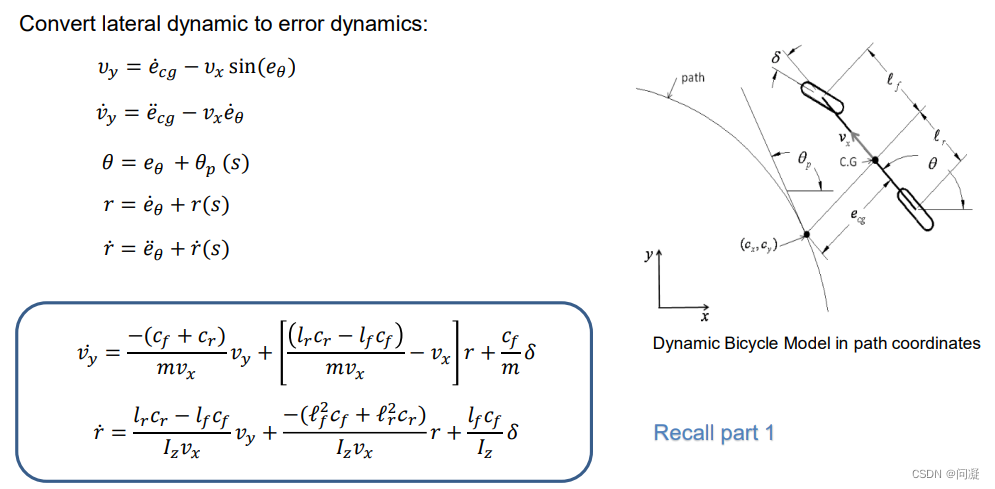
根据上面自行车模型推出来的状态方程和这里Vy和r的导数的方程推导出来如下的状态方程:
三、LQR代码
// **TODO **计算控制命令 该函数定频调用 bool LqrController::ComputeControlCommand(const VehicleState &localization, const TrajectoryData &planning_published_trajectory, ControlCmd &cmd) { // 规划轨迹 trajectory_points_ = planning_published_trajectory.trajectory_points; /* A matrix (Gear Drive) [0.0, 1.0, 0.0,0.0; 0.0, (-(c_f + c_r) / m) / v, (c_f + c_r) / m, (l_r * c_r - l_f * c_f) / m / v; 0.0, 0.0, 0.0,1.0; 0.0, ((lr * cr - lf * cf) / i_z) / v, (l_f * c_f - l_r * c_r) / i_z, (-1.0 * (l_f^2 * c_f + l_r^2 * c_r) / i_z) / v;] */ // TODO 01 配置状态矩阵A /* b = [0.0, c_f / m, 0.0, l_f * c_f / i_z]^T */ // TODO 02 动力矩阵B // cout steer_angle = atan2_to_PI(20.0); } else if (steer_angle steer_angle = -atan2_to_PI(20.0); } // Set the steer commands cmd.steer_target = steer_angle; std::cout // LateralControlError lat_con_err; // 将其更改为智能指针 std::shared_ptr double v = std::max(vehicle_state.velocity, minimum_speed_protection_); matrix_a_(1, 1) = matrix_a_coeff_(1, 1) / v; matrix_a_(1, 3) = matrix_a_coeff_(1, 3) / v; matrix_a_(3, 1) = matrix_a_coeff_(3, 1) / v; matrix_a_(3, 3) = matrix_a_coeff_(3, 3) / v; Matrix I = Matrix::Identity(basic_state_size_, basic_state_size_); matrix_ad_ = (I + matrix_a_ * ts_); } // TODO 07 前馈控制,计算横向转角的反馈量 double LqrController::ComputeFeedForward(const VehicleState &localization, double ref_curvature) { if(isnan(ref_curvature)) { ref_curvature= 0; } double kv = (lr_*mass_/(2*cf_*(lf_+lr_))) - (lf_*mass_ /(2*cr_*(lf_+lr_))); double v = localization.velocity; double steer_angle_feedforward = ref_curvature * wheelbase_ + kv * v * v * ref_curvature - matrix_k_(0,2) * ref_curvature * (lr_ - lf_ * mass_ * v * v / (2 * cr_ * wheelbase_)); return steer_angle_feedforward; } // TODO 03 计算误差 void LqrController::ComputeLateralErrors(const double x, const double y, const double theta, const double linear_v, const double angular_v, const double linear_a, LateralControlErrorPtr &lat_con_err) { TrajectoryPoint nearest_point = QueryNearestPointByPosition(x, y); double ref_theta = nearest_point.heading; double dx = nearest_point.x - x; double dy = nearest_point.y - y; double e_theta = NormalizeAngle(ref_theta - theta); lat_con_err-lateral_error = dy * cos(ref_theta) - dx * sin(ref_theta); lat_con_err-lateral_error_rate = linear_v * sin(e_theta); lat_con_err-heading_error = NormalizeAngle(ref_theta - theta); lat_con_err-heading_error_rate = nearest_point.v * nearest_point.kappa - angular_v ; std::cout double d_min = PointDistanceSquare(trajectory_points_.front(), x, y); size_t index_min = 0; for (size_t i = 1; i







