

边框回归损失函数
- 1. SIoU
- 1.1 原理
- 1.2 代码实现
1. SIoU
1.1 原理
有关IoU损失函数,如(GIoU, DIoU, CIoU)没有考虑到真实框与预测框框之间的方向,导致收敛速度较慢,对此SIoU引入真实框和预测框之间的向量角度,重新定义相关损失函数,具体包含四个部分:
(1)角度损失(Angle cost),定义如下
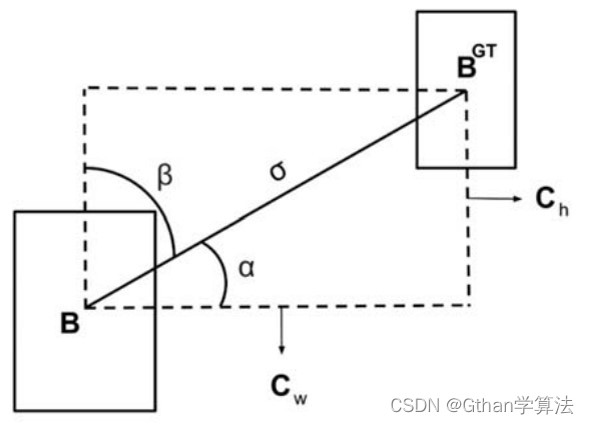
Λ = 1 − 2 ∗ sin 2 ( arcsin ( c h σ ) − π 4 ) = cos ( 2 ∗ ( arcsin ( c h σ ) − π 4 ) ) \Lambda = 1-2*\sin^2(\arcsin(\frac{c_h}{\sigma}) - \frac{\pi}{4})=\cos(2*(\arcsin(\frac{c_h}{\sigma}) - \frac{\pi}{4})) Λ=1−2∗sin2(arcsin(σch)−4π)=cos(2∗(arcsin(σch)−4π))
其中 c h c_h ch为真实框和预测框中心点的高度差, σ \sigma σ为真实框和预测框中心点的距离,事实上 arcsin ( c h σ ) \arcsin (\frac{c_h}{\sigma}) arcsin(σch)等于角度 α \alpha α
c h σ = sin ( α ) \frac{c_h}{\sigma}=\sin(\alpha) σch=sin(α)
σ = ( b c x g t − b c x ) 2 + ( b c y g t − b c y ) 2 \sigma = \sqrt{(b_{c_x}^{gt}-b_{c_x})^2+(b_{c_y}^{gt}-b_{c_y})^2} σ=(bcxgt−bcx)2+(bcygt−bcy)2
c h = max ( b c y g t , b c y ) − min ( b c y g t , b c y ) c_h = \max(b_{c_y}^{gt}, b_{c_y}) - \min(b_{c_y}^{gt}, b_{c_y}) ch=max(bcygt,bcy)−min(bcygt,bcy)
( b c x g t , b c y g t ) (b_{c_x}^{gt}, b_{c_y}^{gt}) (bcxgt,bcygt)为真实框中心坐标 ( b c x , b c y ) (b_{c_x}, b_{c_y}) (bcx,bcy)为预测框中心坐标,可以注意到当 α \alpha α为 π 2 \frac{\pi}{2} 2π或0时,角度损失为0,在训练过程中若 α







