

摘要:本文介紹如何使用直流有刷電機驅動模塊——L9110S、TB6612FNG和DRV8833
在前邊很詳細的介紹了直流有刷電機驅動模塊L298N,該模塊性能良好,輸出功率大。但體積也是偏大,本篇文章介紹一下市場上另外幾個常見的小型直流有刷電機驅動模塊L9110S、TB6612FNG和DRV8833的使用方法。
因爲都是直流有刷電機的驅動模塊,因此這幾個在使用上也是差别不大,如果有前面學習L298N的基礎,相信很快就能掌握這幾個模塊的使用方法。在旋轉電機驅動模塊的時候,最主要的指标就是電機驅動模塊所支持的電壓範圍和最大電流要滿足直流電機的要求。在這兩點滿足要求的情況下,可以選擇體積小一些的、易于安裝的驅動模塊來使用。
- L9110S
L9110S是爲控制和驅動電機設計的兩通道推挽式功率放大專用集成電路器件,将分立電路集成在單片IC之中,使外圍器件成本降低,整機可靠性提高。該芯片有兩個TTL/CMOS兼容電平的輸入,具有良好的抗幹擾性;兩個輸出端能直接驅動電機的正反向運動,它具有較大的電流驅動能力,每通道能通過800mA的持續電流,峰值電流能力可達1.5A;同時它具有較低的輸出飽和壓降;内置的鉗位二極管能釋放感性負載的反向沖擊電流,使它在驅動繼電器、直流電機、步進電機或開關功率管的使用上安全可靠。L9110S 被廣泛應用于玩具汽車電機驅動、脈沖電磁閥門驅動,步進電機驅動和開關功率管等電路上。
常見的L9110S模塊如下圖所示:

上圖左側爲2路L9110S驅動模塊,右圖爲4路L9110S驅動模塊,圖中的黑色芯片就是L9110S芯片,每個芯片可以驅動一路直流電機。整個芯片的集成度非常的高,隻有極少的外圍電路。
L9110S芯片的參數如下:
- 極限參數:800mA/2.5V-12V
- 低靜态工作電流:0.00 uA
- 寬電源電壓範圍:2.5V-12V ;
- 每通道輸出能力:800mA連續電流
- 工作溫度:-30 ℃-105 ℃。
- 輸入類型:标準型
在這裏要重點把握的是工作電壓爲2.5V~12V,持續電流輸出能力爲800mA,峰值電流1.5A。對于在這個參數範圍之内的小型直流有刷電動機,可以放心選用這個驅動模塊。
下面來看一下L9110S的接口和使用方法。如下圖所示:
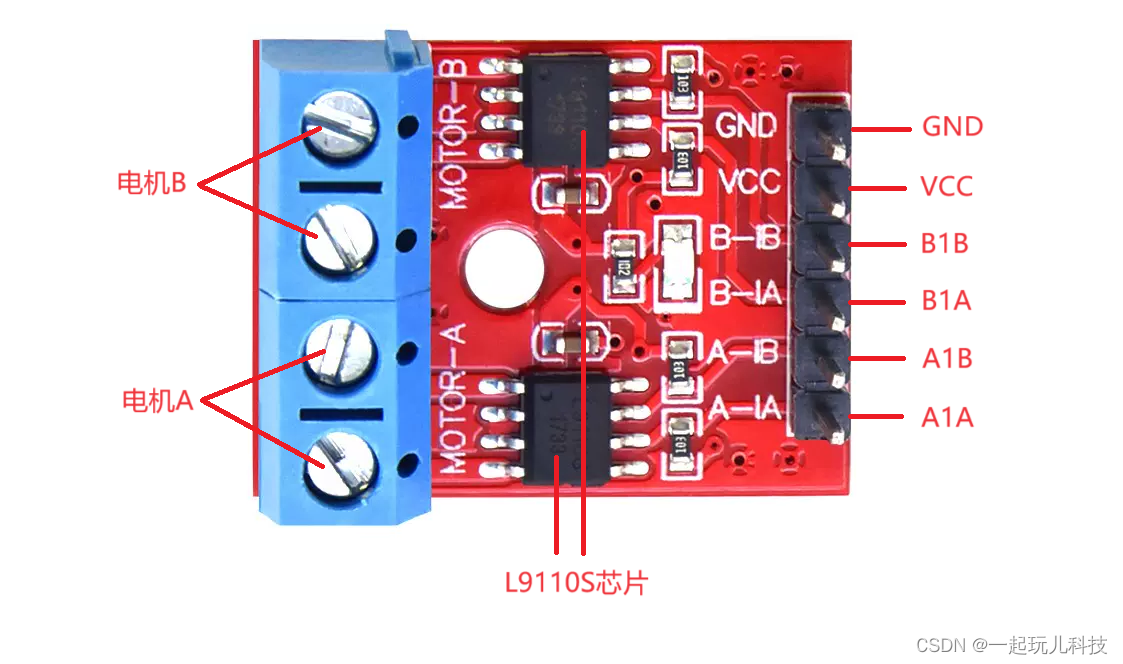
引腳定義說明如下表所示:
| 标識 | 名稱 | 說明 |
| GND | 電源地 | |
| VCC | 電源正極 | 電壓範圍2.5V~12V |
| B1B | 電機B控制引腳B | 接單片機的IO引腳 |
| B1A | 電機B控制引腳A | 接單片機的IO引腳 |
| A1B | 電機A控制引腳B | 接單片機的IO引腳 |
| A1A | 電機A控制引腳A | 接單片機的IO引腳 |
| MOTOR-B | 電機B | 接一個電動機的兩端 |
| MOTOR-A | 電機A | 接一個電動機的兩端 |
可以看到,L9110S相對于之前介紹的L298N要簡單了一些。由于沒有了使能端,整個模塊的控制邏輯也就簡單了。具體的控制邏輯如下所示:
| 控制端 | 控制端狀态 | |||
| A1A | 0 | 0 | 1 | 1 |
| A1B | 0 | 1 | 0 | 1 |
| 電機A狀态 | 停止 | 反轉 | 正轉 | 停止 |
| B1A | 0 | 0 | 1 | 1 |
| B1B | 0 | 1 | 0 | 1 |
| 電機B狀态 | 停止 | 反轉 | 正轉 | 停止 |
可以看到,這個控制邏輯與L298N使能端接高電平時的控制方式時完全一樣的。如果想要改變電機的轉速,那麽同樣是通過控制L9110S的單片機IO引腳輸出PWM信号就可以了。
2. TB6612FNG
TB6612FNG是一款直流電機驅動器件,采用支持大電流的MOSFET-H橋結構,雙通道電路輸出,每一個芯片可同時驅動2個電機。
TB6612FNG的電機驅動電壓與邏輯控制電壓可以分别連接不同的電源,電機驅動電壓VM可以在3~13.5V之間,邏輯控制部分的輸入電壓VCC在2.7~5.5V之間。TB6612FNG每通道可輸出最高1.2A的連續驅動電流,啓動峰值電流達2A/3.2A(連續脈沖/單脈沖);有4種電機控制模式:正轉/反轉/制動/停止;PWM支持頻率高達100kHz;支持待機狀态;有片内低壓檢測電路與熱停機保護電路;工作溫度:-20~85℃。
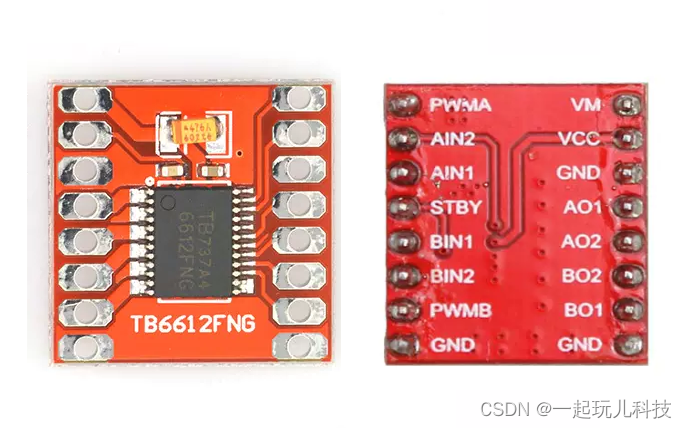
下面來看一下TB6612FNG的引腳說明,如下表所示:
| 引腳 | 名稱 | 連接 |
| PWMA | 電機A的PWM控制引腳 | A通道的PWM輸入 |
| AIN2 | 電機A控制引腳2 | A通道邏輯輸入2引腳 |
| AIN1 | 電機A控制引腳1 | A通道邏輯輸入1引腳 |
| STBY | 模塊待機引腳 | 接低電平處于待機模式,接高電平開始工作 |
| BIN1 | 電機B控制引腳1 | B通道邏輯輸入1引腳 |
| BIN2 | 電機B控制引腳2 | B通道邏輯輸入2引腳 |
| PWMB | 電機B的PWM控制引腳 | B通道PWM輸入引腳 |
| GND | 電源地 | |
| VM | 電機驅動電源 | 電源輸入正極,最大接13.5V |
| VCC | 邏輯控制電源 | 邏輯電源正極,接3.3V |
| AO1 | 電機A引腳1 | A通道輸出1引腳 |
| AO2 | 電機A引腳2 | A通道輸出2引腳 |
| BO2 | 電機B引腳1 | B通道輸出2引腳 |
| BO1 | 電機B引腳2 | B通道輸出1引腳 |
通過上表,可以看到這個芯片提供了單獨的待機引腳是這個模塊的一個特點,可以通過控制STBY引腳來使整個芯片處于待機狀态,降低芯片的功耗。如果不需要這個功能,可以将其接在VCC端,始終保持高電平,芯片一直處于工作狀态。這個芯片的另一個特點就是驅動電機的電源與控制部分的電源是分開的,因此需要根據情況,提供兩路電源才能正常工作。
由于TB6612FNG在控制邏輯上與L298N沒什麽區别。PWM控制引腳用來控制電機的速度,IN引腳用來控制電機的方向。在這裏就不再講解了。
3. DRV8833
DRV8833是一種雙通道電機驅動方案。每一個芯片有兩路H橋驅動,可以驅動兩個有刷直流電機。每一個H橋的功率輸出模塊由N通道功率MOSFET組成,叫作H橋驅動器。每個橋包含整流電路和限流電路。内部關斷功能包含過流保護,短路保護,欠壓鎖定保護和過溫保護,并提供一個錯誤輸出管腳。
DRV8833芯片的電源供電電壓爲2.7~10.8V,每個H橋輸出的均方根(RMS)電流爲1.5A,峰值可達2A。DRV8833模塊如下圖所示:
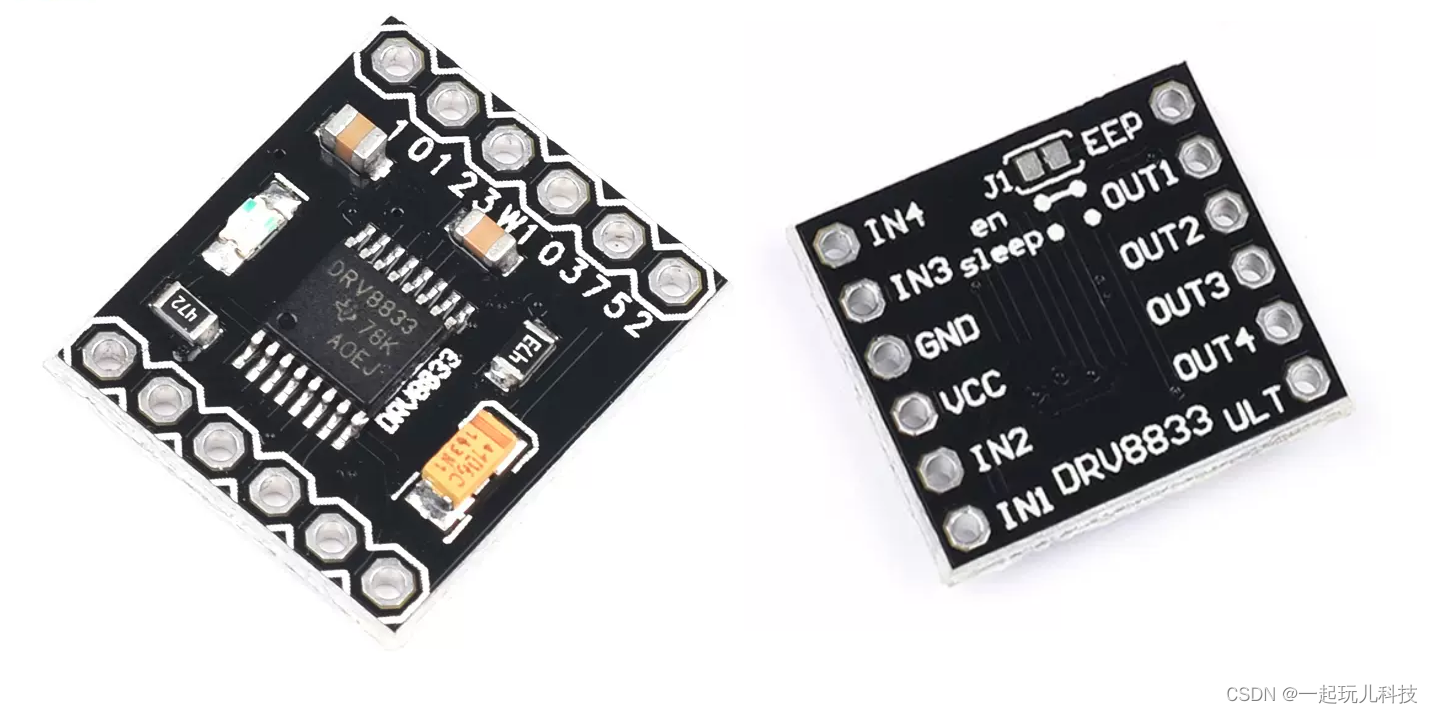
DRV8833模塊沒有PWM控制端,也就是如果需要調整電機的速度,需要通過IN端來實現。EEP(SLEEP的簡稱)接口爲休眠端口,可以通過程序控制,使其工作在待機狀态,降低能耗。在這裏需要注意的是,EEP前邊的J1跳線需要斷開,EEP接口才能發揮作用。如果J1跳線被短路了,那就說明EEP引腳被接到高電平了,會始終處于工作狀态。
DRV8833模塊的一個特點是有個ULT(FAULT)引腳,這個引腳是漏極開路輸出,平時處于高電平,在連接單片機引腳時需要增加上拉電阻,或者讓單片機引腳工作在弱上拉狀态。當DRV8833芯片出現溫度過高、電流過大時,該引腳會輸出低電平,單片機可以可以通過監測此引腳來知曉DRV8833模塊是否處于正常工作狀态,并在出現異常時,采取必要的措施。
好了,常見的直流有刷電機驅動模塊就介紹到這裏了。總體上來說大同小異,個别差異不大。








