

YOLOV7基于自定义数据集训练专属于自己的目标检测模型
- 0.引言
- 1.数据集准备
- (1)把yolov7克隆到本地
- (2)指定格式存放数据集
- (3)按比例划分数据集
- (4)将xml文件转换成YOLO系列标准读取的txt文件
- (5)查看自定义数据集标签类别及数量
- 2.训练配置准备
- (1)安装requirements
- (2)修改模型配置文件
- (3)修改数据加载配置文件
- 3.训练检测模型
- 4.测试模型性能
- 5.实战检测模型性能
- 6.导出模型
- 7.后续
0.引言
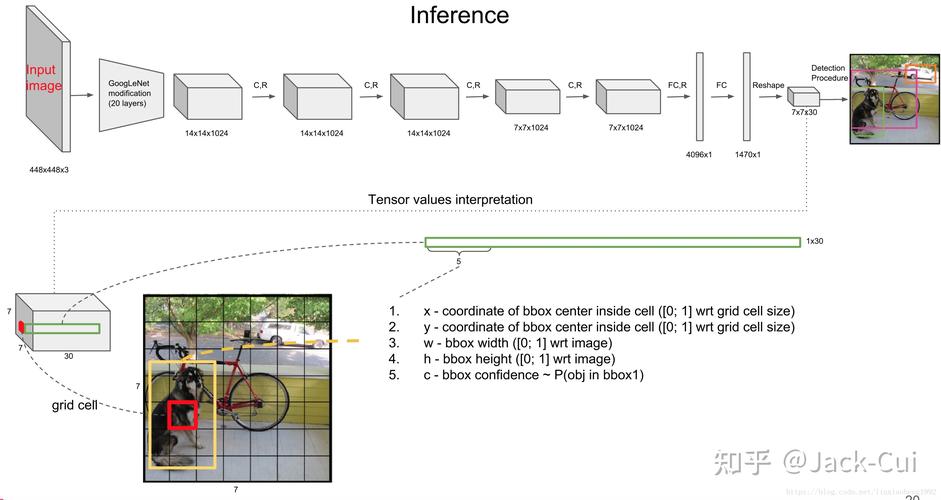
YOLOv7作为YOLO系列的又一大巅峰之作,下面将介绍利用自己的数据集训练YOLOv7模型。
 (图片来源网络,侵删)
(图片来源网络,侵删)github代码链接:https://github.com/WongKinYiu/yolov7 目前版本为v0.1
运行环境如下:
 (图片来源网络,侵删)
(图片来源网络,侵删)- ubuntu20.04
- cuda11.0
- cudnn8.0.4
- python3.8
- torch1.12.0
- torchvision0.11.0
1.数据集准备
(1)把yolov7克隆到本地
git clone https://github.com/WongKinYiu/yolov7.git
(2)指定格式存放数据集
在data目录下新建Annotations, images, ImageSets, labels 四个文件夹
images目录下存放数据集的图片文件
Annotations目录下存放图片的xml文件(labelImg标注)
目录结构如下所示
. ├── ./data │ ├── ./data/Annotations │ │ ├── ./data/Annotations/fall_0.xml │ │ ├── ./data/Annotations/fall_1000.xml │ │ ├── ./data/Annotations/fall_1001.xml │ │ ├── ./data/Annotations/fall_1002.xml │ │ ├── ./data/Annotations/fall_1003.xml │ │ ├── ./data/Annotations/fall_1004.xml │ │ ├── ... │ ├── ./data/images │ │ ├── ./data/images/fall_0.jpg │ │ ├── ./data/images/fall_1000.jpg │ │ ├── ./data/images/fall_1001.jpg │ │ ├── ./data/images/fall_1002.jpg │ │ ├── ./data/images/fall_1003.jpg │ │ ├── ./data/images/fall_1004.jpg │ │ ├── ... │ ├── ./data/ImageSets │ └── ./data/labels │ ├── ./data/coco.yaml │ ├── ./data/hyp.scratch.p5.yaml │ ├── ./data/hyp.scratch.p6.yaml │ ├── ./data/hyp.scratch.tiny.yaml ├── ./cfg ├── ./detect.py ├── ./figure ├── ./hubconf.py ├── ./inference ├── ./models ├── ./README.md ├── ....
(3)按比例划分数据集
在yolov7根目录下新建一个文件splitDataset.py
随机分配训练/验证/测试集图片,代码如下所示:
import os import random trainval_percent = 0.9 train_percent = 0.9 xmlfilepath = 'data/Annotations' txtsavepath = 'data/ImageSets' total_xml = os.listdir(xmlfilepath) num = len(total_xml) list = range(num) tv = int(num * trainval_percent) tr = int(tv * train_percent) trainval = random.sample(list, tv) train = random.sample(trainval, tr) ftrainval = open('data/ImageSets/trainval.txt', 'w') ftest = open('data/ImageSets/test.txt', 'w') ftrain = open('data/ImageSets/train.txt', 'w') fval = open('data/ImageSets/val.txt', 'w') for i in list: name = total_xml[i][:-4] + '\n' if i in trainval: ftrainval.write(name) if i in train: ftrain.write(name) else: fval.write(name) else: ftest.write(name) ftrainval.close() ftrain.close() fval.close() ftest.close()(4)将xml文件转换成YOLO系列标准读取的txt文件
在同级目录下再新建一个文件XML2TXT.py
注意classes = [“…”]一定需要填写自己数据集的类别,在这里我是一个类别"fall",因此classes = [“fall”],代码如下所示:
如果数据集中的类别比较多不想手敲类别的,可以使用(5)中的脚本直接获取类别,同时还能查看各个类别的数据量,如果不想可以直接跳过(5)。
# -*- coding: utf-8 -*- # xml解析包 import xml.etree.ElementTree as ET import pickle import os from os import listdir, getcwd from os.path import join sets = ['train', 'test', 'val'] classes = ['fall'] # 进行归一化操作 def convert(size, box): # size:(原图w,原图h) , box:(xmin,xmax,ymin,ymax) dw = 1./size[0] # 1/w dh = 1./size[1] # 1/h x = (box[0] + box[1])/2.0 # 物体在图中的中心点x坐标 y = (box[2] + box[3])/2.0 # 物体在图中的中心点y坐标 w = box[1] - box[0] # 物体实际像素宽度 h = box[3] - box[2] # 物体实际像素高度 x = x*dw # 物体中心点x的坐标比(相当于 x/原图w) w = w*dw # 物体宽度的宽度比(相当于 w/原图w) y = y*dh # 物体中心点y的坐标比(相当于 y/原图h) h = h*dh # 物体宽度的宽度比(相当于 h/原图h) return (x, y, w, h) # 返回 相对于原图的物体中心点的x坐标比,y坐标比,宽度比,高度比,取值范围[0-1] # year ='2012', 对应图片的id(文件名) def convert_annotation(image_id): ''' 将对应文件名的xml文件转化为label文件,xml文件包含了对应的bunding框以及图片长款大小等信息, 通过对其解析,然后进行归一化最终读到label文件中去,也就是说 一张图片文件对应一个xml文件,然后通过解析和归一化,能够将对应的信息保存到唯一一个label文件中去 labal文件中的格式:calss x y w h 同时,一张图片对应的类别有多个,所以对应的bunding的信息也有多个 ''' # 对应的通过year 找到相应的文件夹,并且打开相应image_id的xml文件,其对应bund文件 in_file = open('data/Annotations/%s.xml' % (image_id), encoding='utf-8') # 准备在对应的image_id 中写入对应的label,分别为 # out_file = open('data/labels/%s.txt' % (image_id), 'w', encoding='utf-8') # 解析xml文件 tree = ET.parse(in_file) # 获得对应的键值对 root = tree.getroot() # 获得图片的尺寸大小 size = root.find('size') # 如果xml内的标记为空,增加判断条件 if size != None: # 获得宽 w = int(size.find('width').text) # 获得高 h = int(size.find('height').text) # 遍历目标obj for obj in root.iter('object'): # 获得difficult ?? difficult = obj.find('difficult').text # 获得类别 =string 类型 cls = obj.find('name').text # 如果类别不是对应在我们预定好的class文件中,或difficult==1则跳过 if cls not in classes or int(difficult) == 1: continue # 通过类别名称找到id cls_id = classes.index(cls) # 找到bndbox 对象 xmlbox = obj.find('bndbox') # 获取对应的bndbox的数组 = ['xmin','xmax','ymin','ymax'] b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text)) print(image_id, cls, b) # 带入进行归一化操作 # w = 宽, h = 高, b= bndbox的数组 = ['xmin','xmax','ymin','ymax'] bb = convert((w, h), b) # bb 对应的是归一化后的(x,y,w,h) # 生成 calss x y w h 在label文件中 out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n') # 返回当前工作目录 wd = getcwd() print(wd) for image_set in sets: ''' 对所有的文件数据集进行遍历 做了两个工作: 1.将所有图片文件都遍历一遍,并且将其所有的全路径都写在对应的txt文件中去,方便定位 2.同时对所有的图片文件进行解析和转化,将其对应的bundingbox 以及类别的信息全部解析写到label 文件中去 最后再通过直接读取文件,就能找到对应的label 信息 ''' # 先找labels文件夹如果不存在则创建 if not os.path.exists('data/labels/'): os.makedirs('data/labels/') # 读取在ImageSets/Main 中的train、test..等文件的内容 # 包含对应的文件名称 image_ids = open('data/ImageSets/%s.txt' % (image_set)).read().strip().split() # 打开对应的2012_train.txt 文件对其进行写入准备 list_file = open('data/%s.txt' % (image_set), 'w') # 将对应的文件_id以及全路径写进去并换行 for image_id in image_ids: list_file.write('data/images/%s.jpg\n' % (image_id)) # 调用 year = 年份 image_id = 对应的文件名_id convert_annotation(image_id) # 关闭文件 list_file.close()(5)查看自定义数据集标签类别及数量
在同级目录下再新建一个文件ViewCategory.py,将代码复制进去
import os from Unicodedata import name import xml.etree.ElementTree as ET import glob def count_num(indir): label_list = [] # 提取xml文件列表 os.chdir(indir) annotations = os.listdir('.') annotations = glob.glob(str(annotations) + '*.xml') dict = {} # 新建字典,用于存放各类标签名及其对应的数目 for i, file in enumerate(annotations): # 遍历xml文件 # actual parsing in_file = open(file, encoding='utf-8') tree = ET.parse(in_file) root = tree.getroot() # 遍历文件的所有标签 for obj in root.iter('object'): name = obj.find('name').text if (name in dict.keys()): dict[name] += 1 # 如果标签不是第一次出现,则+1 else: dict[name] = 1 # 如果标签是第一次出现,则将该标签名对应的value初始化为1 # 打印结果 print("各类标签的数量分别为:") for key in dict.keys(): print(key + ': ' + str(dict[key])) label_list.append(key) print("标签类别如下:") print(label_list) if __name__ == '__main__': # xml文件所在的目录,修改此处 indir = 'data/Annotations' count_num(indir) # 调用函数统计各类标签数目
至此数据集的准备已经就绪,索引文件在data目录下的train.txt/val.txt/test.txt
2.训练配置准备
(1)安装requirements
首先需要先利用终端进入yolov7文件夹,创建python环境,这里以anaconda举例
cd yolov7 conda create -n yolov7 python=3.8 conda activate yolov7 pip install -r requirements.txt
(2)修改模型配置文件
进入cfg/training文件夹,选择需要训练的模型配置文件,这里选择yolov7.yaml,将其中的nc修改为自己的类别数量,这里修改为1
# parameters nc: 1 # number of classes depth_multiple: 1.0 # model depth multiple width_multiple: 1.0 # layer channel multiple # anchors anchors: - [12,16, 19,36, 40,28] # P3/8 - [36,75, 76,55, 72,146] # P4/16 - [142,110, 192,243, 459,401] # P5/32 # yolov7 backbone backbone: # [from, number, module, args] [[-1, 1, Conv, [32, 3, 1]], # 0 [-1, 1, Conv, [64, 3, 2]], # 1-P1/2 [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [128, 3, 2]], # 3-P2/4 [-1, 1, Conv, [64, 1, 1]], [-2, 1, Conv, [64, 1, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], # 11 [-1, 1, MP, []], [-1, 1, Conv, [128, 1, 1]], [-3, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 2]], [[-1, -3], 1, Concat, [1]], # 16-P3/8 [-1, 1, Conv, [128, 1, 1]], [-2, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [512, 1, 1]], # 24 [-1, 1, MP, []], [-1, 1, Conv, [256, 1, 1]], [-3, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 2]], [[-1, -3], 1, Concat, [1]], # 29-P4/16 [-1, 1, Conv, [256, 1, 1]], [-2, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [1024, 1, 1]], # 37 [-1, 1, MP, []], [-1, 1, Conv, [512, 1, 1]], [-3, 1, Conv, [512, 1, 1]], [-1, 1, Conv, [512, 3, 2]], [[-1, -3], 1, Concat, [1]], # 42-P5/32 [-1, 1, Conv, [256, 1, 1]], [-2, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [1024, 1, 1]], # 50 ] # yolov7 head head: [[-1, 1, SPPCSPC, [512]], # 51 [-1, 1, Conv, [256, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [37, 1, Conv, [256, 1, 1]], # route backbone P4 [[-1, -2], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], [-2, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], # 63 [-1, 1, Conv, [128, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [24, 1, Conv, [128, 1, 1]], # route backbone P3 [[-1, -2], 1, Concat, [1]], [-1, 1, Conv, [128, 1, 1]], [-2, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [64, 3, 1]], [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [128, 1, 1]], # 75 [-1, 1, MP, []], [-1, 1, Conv, [128, 1, 1]], [-3, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 2]], [[-1, -3, 63], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], [-2, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], # 88 [-1, 1, MP, []], [-1, 1, Conv, [256, 1, 1]], [-3, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 2]], [[-1, -3, 51], 1, Concat, [1]], [-1, 1, Conv, [512, 1, 1]], [-2, 1, Conv, [512, 1, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [[-1, -2, -3, -4, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [512, 1, 1]], # 101 [75, 1, RepConv, [256, 3, 1]], [88, 1, RepConv, [512, 3, 1]], [101, 1, RepConv, [1024, 3, 1]], [[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5) ](3)修改数据加载配置文件
进入data/文件夹,新建fall.yaml,内容如下:
train: ./data/train.txt val: ./data/val.txt test: ./data/test.txt # number of classes nc: 1 # class names names: ['fall']
至此,配置文件修改完成
3.训练检测模型
yolov7仓库中有两个训练脚本,一个叫train.py,一个叫train_aux.py,前者是训练P5的模型,包含yolov7-tiny、yolov7-tiny-silu、yolov7、yolov7x,后者是训练P6的模型,包含yolov7-w6、yolov7-e6、yolov7-d6、yolov7-e6e。
# 训练P5模型 python train.py --weights yolov7.pt --data data/fall.yaml --epochs 300 --batch-size 8 --cfg cfg/training/yolov7.yaml --workers 0 --device 0 --img-size 640 640 # 训练P6模型 python train_aux.py --weights yolov7-e6e.pt --data data/fall.yaml --epochs 300 --batch-size 8 --cfg cfg/training/yolov7-e6e.yaml --workers 0 --device 0 --img-size 1280 1280
其中,–weights是指预训练模型权重,可以去yolov7官方链接下载,指定到相应目录下(推荐),如果没有配置网络可能会存在git不了权重文件
–data是指数据加载文件路径
–epoch是指模型训练轮次
–batch-size是指一批次输入多少数据一起训练,根据自己显卡的显存决定
–cfg是指模型加载文件路径,关于–cfg中的training和deploy可以参考这篇文章:training和deploy的区别
–workers是指dataloader同时读取多少个进程,如果num_worker设为0,意味着每一轮迭代时,dataloader不再有自主加载数据到RAM这一步骤(因为没有worker了),而是在RA中找batch,找不到时再加载相应的batch。缺点当然是速度慢。设置为0可以避免一些错误发生
–device是指选用几号GPU
–img-size是指训练集和测试集图像大小,可选640或1280等
–rect是指是否采用矩阵推理的方式去训练模型,采用矩阵推理就不要求送入的训练的图片是正方形
–resume断点续训
–evolve超参数进化,模型提供的默认参数是通过在COCO数据集上使用超参数进化得来的
–linear-lr利用余弦函数对训练中的学习率进行调整
# 训练P5模型 python -m torch.distributed.launch --nproc_per_node 4 --master_port 9527 train.py --workers 8 --device 0,1,2,3 --sync-bn --batch-size 8 --data data/fall.yaml --img 640 640 --cfg cfg/training/yolov7.yaml --weights '' --name yolov7 --hyp data/hyp.scratch.p5.yaml # 训练P6模型 python -m torch.distributed.launch --nproc_per_node 8 --master_port 9527 train_aux.py --workers 8 --device 0,1,2,3,4,5,6,7 --sync-bn --batch-size 8 --data data/fall.yaml --img 1280 1280 --cfg cfg/training/yolov7-e6e.yaml --weights '' --name yolov7-w6 --hyp data/hyp.scratch.p6.yaml
4.测试模型性能
使用test.py文件可以对训练出的模型进行测试,与训练命令基本类似,但是这里需要注意的是,需要把:
# 训练P5模型 python test.py --weights exp/best.pt --data data/fall.yaml --batch-size 8 --device 0 --img-size 640 640
5.实战检测模型性能
# 使用摄像头进行目标检测,--source可以设置为图片文件夹/rtsp流地址/视频地址等 python detect.py --weights runs/train/exp/weights/best.pt --source 0
6.导出模型
使用export.py脚本,可以导出成中间格式的onnx模型
python export.py --weights runs/train/exp/best.pt
–weights是通过yolov7训练得到的pt文件,一般存在于runs/train下面的文件夹中,导出后,方便后续部署(onnx/tensorrt/openvino/coreml)
7.后续
导出模型后,GPU环境下可以使用tensorrt进行部署,详情可以参考我这篇文章:
YOLOv7系列教程:二、使用onnx导出成tensorrt模型,实现高性能部署,包含opencv多线程、图像队列存取、自动保存xml和jpg等模块
CPU环境下可以使用openvino进行部署,详情可以参考我这篇文章:
YOLOv7系列教程:三、使用onnx导出成openvino模型,并调用接口进行摄像头推理预测
不同模型对比结果可以看这篇:
YOLOv8(n/s/m/l/x)&YOLOv7(yolov7-tiny/yolov7/yolov7x)&YOLOv5(n/s/m/l/x)不同模型参数/性能对比(含训练及推理速度)
参考文章:
YOLOv5 实现目标检测(训练自己的数据集实现猫猫识别)
YoloV7:训练自己得数据集详细教程







