

1.定义
RANSAC(Random Sample Consensus)算法是一种基于随机采样的迭代算法,用于估计一个数学模型参数。它最初由Fischler和Bolles于1981年提出,主要用于计算机视觉和计算机图形学中的模型拟合和参数估计问题。
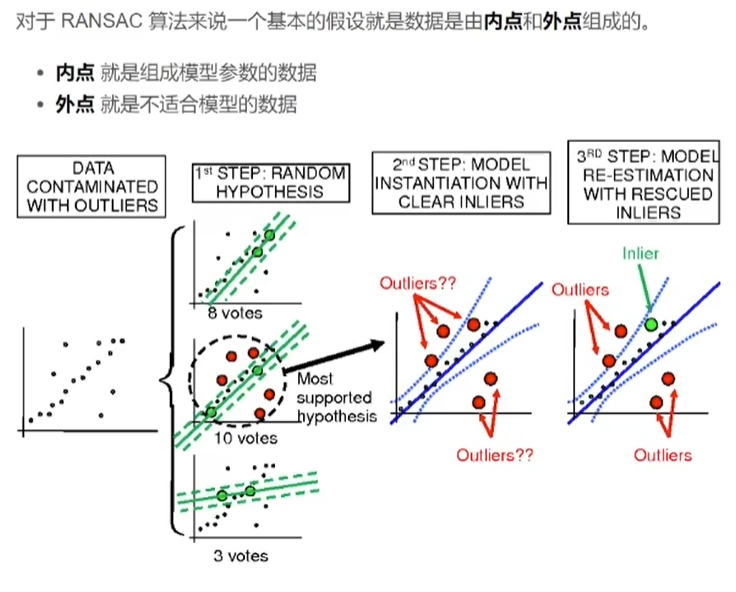
RANSAC算法的基本思想是通过随机采样一小部分数据来估计模型参数,然后用这个模型对所有数据进行测试,将满足模型的数据点作为内点,不满足模型的数据点作为外点。通过迭代的方式不断随机采样和估计模型参数,最终得到内点数目最多的模型作为最终的估计结果。
RANSAC算法的优点是可以处理包含大量外点的数据集,并且不需要事先知道外点的数量。它可以用于解决许多计算机视觉和计算机图形学中的问题,如图像配准、物体识别、三维重建、特征点匹配等。
应用:
1.在点云中我们要平面
2.求解基础矩阵和本质矩阵
2.基本步骤

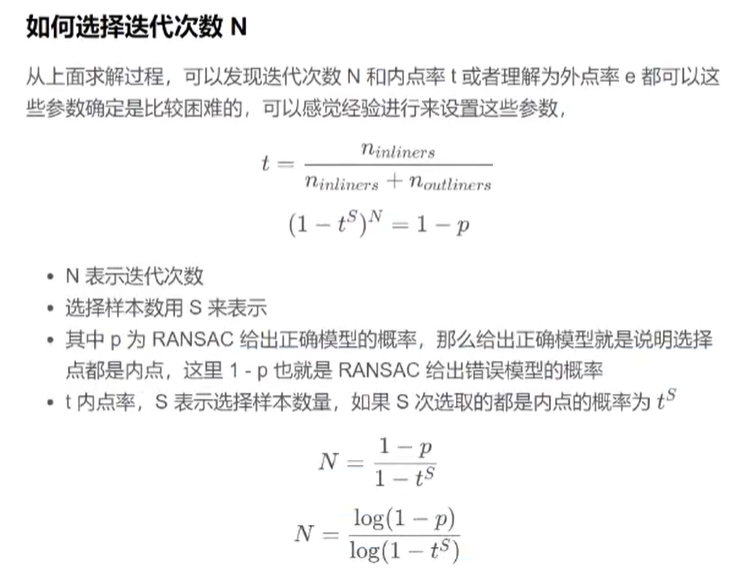
需要注意的是,RANSAC算法的可靠性取决于内点比例和迭代次数,内点比例越高,越容易得到正确的估计结果。但是,随着内点比例的增加,需要的迭代次数也会增加。因此,算法的可靠性和效率需要平衡考虑。
总之,RANSAC算法的基本步骤是随机采样、模型估计、内点外点分类、重复迭代以及最终模型选择。通过迭代的方式逐步提高模型的可靠性,最终得到准确的模型参数。
3.外点率和自适应RANSAC
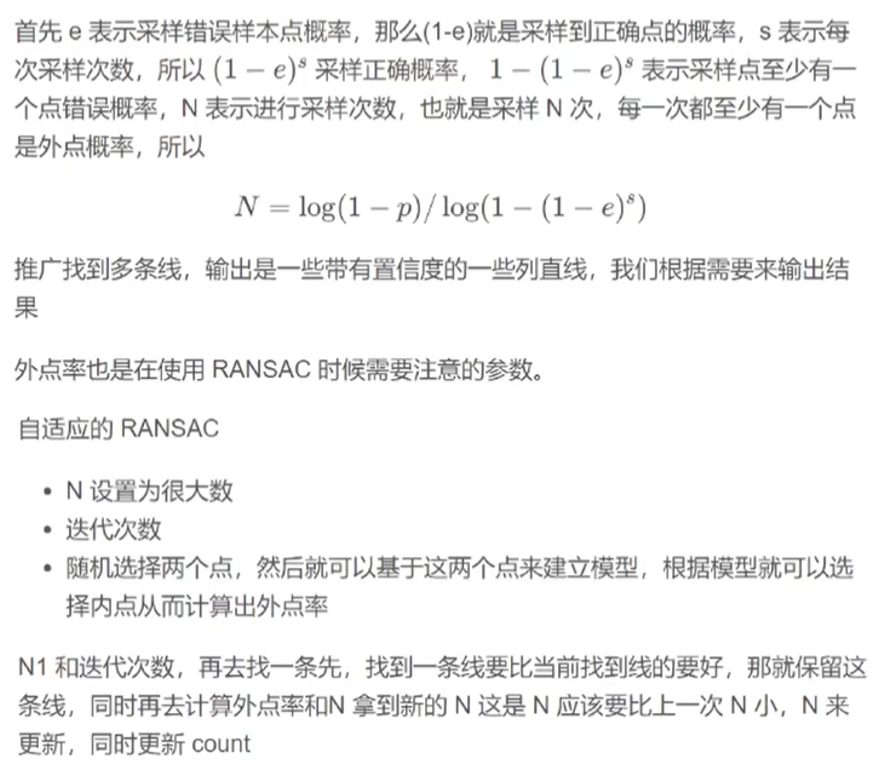

也就是说,每一次迭代,建立一个模型,得到外点率,计算相应的N1,记录count;再次迭代建立模型,得到新的外点率和N,应比上一次要小,这样一来N更新,同时更新count
4.如何计算迭代次数
5.RANSAC算法在C++中的实现:
1)PCL(点云库)
PCL是一个功能强大的点云处理库,其中包含了许多用于3D点云处理的算法,包括RANSAC。它提供了一组现成的数据结构和算法,可用于点云滤波、分割、重建等应用中。
2)OpenCV
OpenCV是一个开源的计算机视觉库,也可以用于3D点云处理。它提供了许多用于3D点云处理的函数和类,包括RANSAC和其它一些用于计算几何的工具。
3)CGAL
CGAL是一个计算几何算法库,也包含了一些用于3D点云处理的算法和数据结构。其中包括用于拟合平面和直线的RANSAC算法。
这些库都可以在C++中用于实现RANSAC-3D算法。选择哪一个库取决于你的具体需求和应用场景。如果你主要需要处理点云数据,那么PCL可能是一个不错的选择。如果你需要进行更一般的计算几何任务,那么CGAL可能更适合你。如果你已经熟悉OpenCV,那么它也可以作为一个选择。
6.Python中相关示例代码
pyransac-3d库官网:pyRANSAC-3D
import numpy as np
from sklearn.neighbors import NearestNeighbors
from sklearn.decomposition import PCA
def ransac_3d(data, n, k, t, d):
"""
RANSAC-3D algorithm for plane fitting
:param data: 3D point cloud data
:param n: the minimum number of points to fit a plane
:param k: the maximum number of iterations
:param t: the inlier distance threshold
:param d: the number of inliers required to accept the result
:return: the best fit plane model and the corresponding inliers
"""
best_model = None
best_inliers = None
for i in range(k):
# Randomly select n points
indices = np.random.choice(data.shape[0], n, replace=False)
sample = data[indices, :]
# Fit a plane to the sample points
pca = PCA(n_components=3)
pca.fit(sample)
normal = pca.components_[2, :]
point = np.mean(sample, axis=0)
plane = np.append(normal, -np.dot(normal, point))
# Compute the distance between each point and the plane
distances = np.abs(np.dot(data, plane[:-1]) + plane[-1])
inliers = np.where(distances = d:
# Refit the plane to all inliers
sample = data[inliers, :]
pca = PCA(n_components=3)
pca.fit(sample)
normal = pca.components_[2, :]
point = np.mean(sample, axis=0)
plane = np.append(normal, -np.dot(normal, point))
# Save the model if it is better than the current best
if best_inliers is None or len(inliers) > len(best_inliers):
best_model = plane
best_inliers = inliers
return best_model, best_inliers
这个算法使用NumPy、Scikit-learn和PCA库来实现,其中Scikit-learn库中的NearestNeighbors类可用于查找最近邻点,PCA类可用于拟合平面。函数中的参数n、k、t和d分别是算法中的最小样本数、迭代次数、阈值和最小内点数。
7.变体:
1)随机RANSAC算法:
随机抽样一致性算法(Random Sample Consensus,RANSAC)是一种迭代算法,用于估计数学模型的参数。它在计算机视觉和计算机图形学等领域中得到了广泛应用,例如拟合线、平面、圆等几何形状、匹配图像特征等。
在随机 RANSAC 模型中,我们首先从数据集中随机选择一组点来构建初始模型。然后,我们对数据集中的每个数据点进行测试,看它是否与当前模型匹配。如果一个数据点与模型匹配,我们称其为内点。否则,我们称其为外点。
在每一次迭代中,我们都会随机选择一些数据点来构建新的模型,并测试数据集中的每个点是否与新模型匹配。我们计算模型能够匹配的内点数量,将此数量称为内点数。我们记录内点数最大的模型,并将内点数大于预设阈值的点作为新的内点集合。
如果我们达到了预设的迭代次数或者已经找到了足够好的模型,则停止迭代,并返回内点最多的模型。如果我们没有找到足够好的模型,则需要重新进行随机抽样,重复上述过程。
需要注意的是,在随机 RANSAC 中,初始模型的选择是随机的,每次迭代中构建新模型的点集也是随机选择的。这种随机性使得算法具有一定的随机性,因此可以在一定程度上避免局部最优解的出现。
随机 RANSAC 模型和 RANSAC 模型都是用于估计数学模型参数的迭代算法,它们的基本思想是一致的,但是它们在实现细节上存在一些差异。
相同点:
- 都是迭代算法,用于估计数学模型的参数。
- 都是基于数据点的内点和外点的概念。
- 都采用了随机性来避免局部最优解。
不同点:
- 随机 RANSAC 模型在每次迭代时,随机选择一些数据点来构建新的模型,而 RANSAC 模型则是从数据集中选择一组点来构建初始模型,然后在每次迭代中选择与当前模型匹配的点来更新模型。
- 随机 RANSAC 模型的初始模型是随机选择的,而 RANSAC 模型是通过数据集中选择一组点来构建的。
- 随机 RANSAC 模型迭代时不断随机选择点集来构建模型,每次迭代中的模型参数不一定相同,而 RANSAC 模型在每次迭代中的模型参数是固定的。
- 随机 RANSAC 模型在每次迭代中都会记录内点数最多的模型,而 RANSAC 模型在每次迭代中只记录内点数最大的模型。
- 随机 RANSAC 模型可以在一定程度上避免局部最优解,但也可能因为随机性导致不同的运行结果不同,而 RANSAC 模型不会受到随机性的影响,可以保证得到相同的结果。
代码实现:
import random
import numpy as np
def ransac(data, model, n, k, t, d, debug=False, return_all=False):
"""
随机 RANSAC 算法
:param data: 数据点集,包含 x 和 y 坐标的数组
:param model: 模型函数,需要输入数据点和模型参数,返回模型估计值
:param n: 用于估计模型所需的最小数据点数
:param k: 迭代次数
:param t: 阈值,用于判断数据点是否与模型匹配
:param d: 数据点集合模型匹配的内点数阈值
:param debug: 是否输出调试信息
:param return_all: 是否返回所有模型参数
:return: 返回估计的模型参数
"""
iterations = 0
best_model = None
best_inliers = []
best_error = np.inf
while iterations d:
# 用所有内点重新估计模型参数
better_model = model(maybe_inliers + also_inliers)
# 计算内点均方误差
this_error = model_error(better_model, maybe_inliers + also_inliers)
# 如果均方误差更小,记录此模型
if this_error
在这个实现中,data 是数据点的集合,model 是估计模型的函数,n 是用于估计模型所需的最小数据







