环境:Windows 10 专业版 + Python 3.9.1 + anaconda 2020( 4.8.2)
系列文章:
人工智能与地理大数据实验--出租车GPS数据—时空大数据Python处理基础(一)
人工智能与地理大数据实验--出租车GPS数据—时空大数据Python处理基础(二)
目录
五、源码流程分析
(一)、出租车数据的时间完整性评估
(二)、出租车数据的空间完整性评估
(三)、出租车订单出行特征分析
六、实验结果
(一)、出租车数据的时间完整性评估
(二)、出租车数据的空间完整性评估
(三)、出租车订单出行特征分析
五、源码流程分析
(一)、出租车数据的时间完整性评估
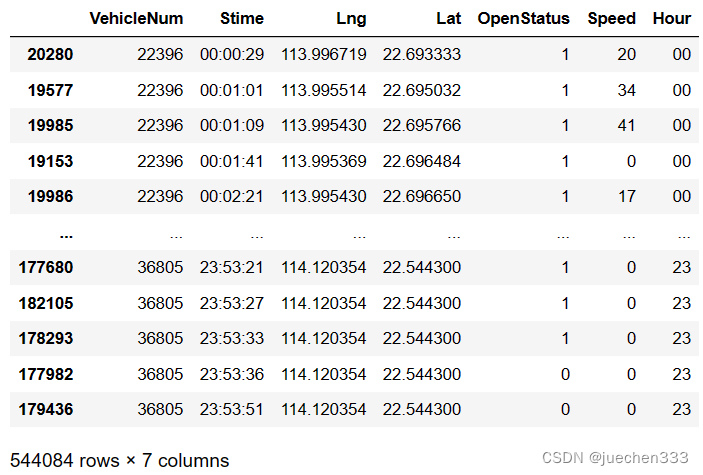
1.时间字段的处理
利用字符串str方法,把Series对象转换为pandas内置的StringMethods对象,并使用StringMethods对象的slice方法截去字符串切片,传入开始与结束位置的索引,提取前两位字符,从而获取小时信息。
# 把Stime列转换为StringMethods对象,进行切片操作,再赋值给Hour列 data['Hour'] = data['Stime'].str.slice(0,2) data
2.数据量的小时集计
同一小时内产生的GPS数据,Hour字段中会拥有相同的值,可以根据这一字段对数据采用groupby方法进行集计操作,再利用count方法指定VehicleNum列统计每小时的数据量。
# 分组并统计各组数量
Hourcount = data.groupby('Hour')['VehicleNum'].count()
# 更改Series的列名,并通过reset_index将Series变成DataFrame
Hourcount = Hourcount.rename('count').reset_index()
Hourcount

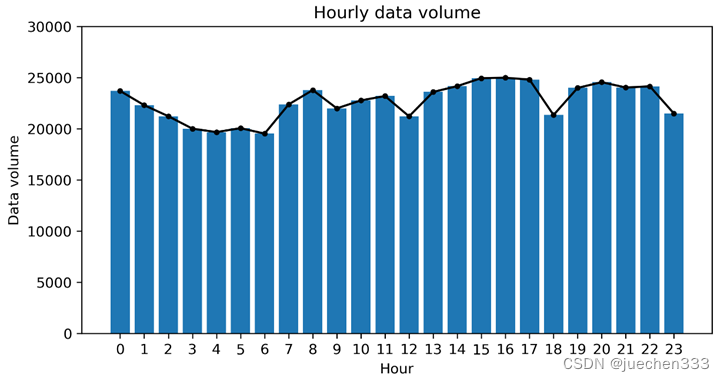
3.数据量时间分布的折线图绘制
通过matplotlib库将数据绘制为简单的折线图与柱状图。
# 1.创建图表
# 导入包
import matplotlib.pyplot as plt
# 创建一个图,图的尺寸为8×4in,dpi为300
fig = plt.figure(1,(8,4),dpi = 300)
# 在图中创建子图
# 111分别表示:创建共一个子图,子图的布局为1行1列
ax = plt.subplot(111)
# 2.在图上画
# 绘制折线图,分别传入节点的x坐标与y坐标,'k-'定义了黑色实线
plt.plot(Hourcount['Hour'],Hourcount['count'],'k-')
# 绘制散点图,分别传入节点的x坐标与y坐标,'k.'定义了黑色散线
plt.plot(Hourcount['Hour'],Hourcount['count'],'k.')
# 绘制柱状图,分别传入节点的x坐标与y坐标
plt.bar(Hourcount['Hour'],Hourcount['count'])
# 3.调整图中元素
# 加y轴标题
plt.ylabel('Data volume')
# 加x轴标题
plt.xlabel('Hour')
# 调整x轴标签
plt.xticks(range(24),range(24))
# 加图标题
plt.title('Hourly data volume')
# 设置y轴范围
plt.ylim(0,30000)
# 显示图
plt.show()
(二)、出租车数据的空间完整性评估
1.出租车GPS数据空间分布栅格图
(1)研究区域栅格生成
用Python代码实现研究范围内栅格,并存储为GeoDataFrame形式。
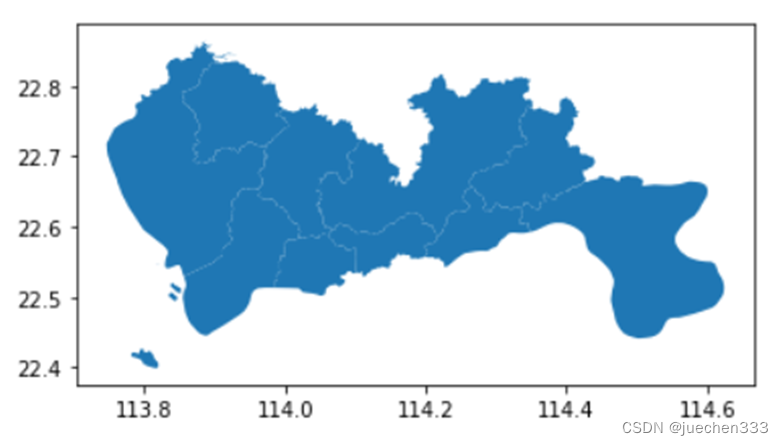
①研究范围行政区划边界的读取
使用Geopandas读取Shapefile文件
# 导入Geopandas import geopandas as gpd # 读取shp格式地理数据文件 sz = gpd.read_file(r'D:\Project\Jupyter_Project\Data\data\sz\sz.shp',encoding = 'utf-8') # 绘制地理数据文件 sz.plot()
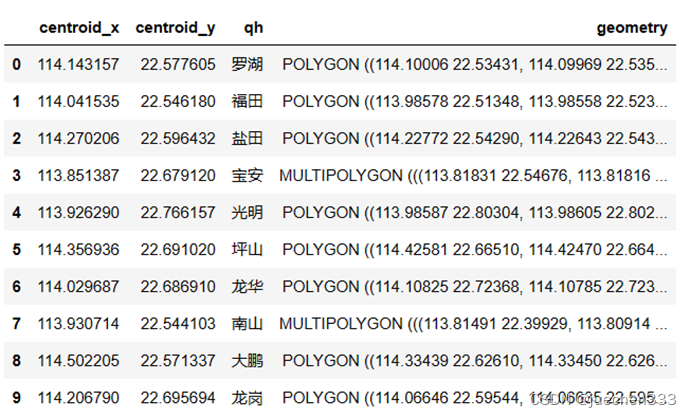
查看读取进来的变量类型及内容
type(sz)
geopandas.geodataframe.GeoDataFrame
sz
②研究范围内栅格的生成
首先定义研究范围与栅格的大小,计算栅格的△lon与△lat。
# 导入math包 import math # 划定栅格划分范围 lon1 = 113.75194 lon2 = 114.624187 lat1 = 22.447837 lat2 = 22.864748 # 取得左下角经纬度 latStart = min(lat1,lat2) lonStart = min(lon1,lon2) # 定义栅格大小,单位为米 accuracy = 500 # 计算栅格的经纬度增加量大小△Lon和△Lat,地球半径取6371004米 deltaLon = accuracy * 360 / (2 * math.pi * 6371004 * math.cos((lat1 + lat2) * math.pi / 360)) deltaLat = accuracy * 360 / (2 * math.pi * 6371004) deltaLon,deltaLat
(0.004872614089207591, 0.004496605206422906)
然后,定义一个测试GPS点的经纬度,计算其对应的栅格编号与中心点经纬度。
# 定义一个GPS点测试栅格化 testlon = 114 testlat = 22.5 # 计算该GPS点对应的栅格编号 LONCOL = divmod(float(testlon) - (lonStart - deltaLon / 2), deltaLon)[0] LATCOL = divmod(float(testlat) - (latStart - deltaLat / 2), deltaLat)[0] # 计算该GPS点对应的栅格中心点经纬度 # 格子编号*格子宽+起始横坐标=格子中心横坐标 HBLON = LONCOL * deltaLon + lonStart HBLAT = LATCOL * deltaLat + latStart LONCOL,LATCOL,HBLON,HBLAT
(51.0, 12.0, 114.00044331854959, 22.501796262477075)
接下来计算每个栅格的四个顶点坐标,循环生成栅格,生成整个研究范围的栅格。
import geopandas as gpd
from shapely.geometry import Polygon
# 定义空的GeoDataFrame表,再往里加栅格
data = gpd.GeoDataFrame()
# 定义空的list,后面循环一次就往里面加东西
LONCOL_list = []
LATCOL_list = []
geometry_list = []
HBLON_list = []
HBLAT_list = []
# 计算行列要生成的栅格数量
# lon方向是lonsum个栅格
lonsnum = int((lon2-lon1) / deltaLon) + 1
# lat方向是latsum个栅格
latsnum = int((lat2-lat1) / deltaLat) + 1
for i in range(lonsnum):
for j in range(latsnum):
# 第i列,第j行的栅格中心点坐标
HBLON = i * deltaLon + lonStart
HBLAT = j * deltaLat + latStart
# 用周围的栅格推算三个顶点的位置
HBLON_1 = (i + 1 ) * deltaLon + lonStart
HBLAT_1 = (j + 1) * deltaLat + latStart
# 生成栅格的Polygon形状
grid_ij = Polygon([
(HBLON - deltaLon / 2, HBLAT - deltaLat / 2),
(HBLON_1 - deltaLon / 2, HBLAT - deltaLat / 2),
(HBLON_1 - deltaLon / 2, HBLAT_1 eltaLat / 2)])
# 把生成的数据都加入到前面定义的空list里面
LONCOL_list.append(i)
LATCOL_list.append(j)
HBLON_list.append(HBLON)
HBLAT_list.append(HBLAT)
geometry_list.append(grid_ij)
# 为GeoPandas文件的每一列赋值为刚刚的list
data['LONCOL'] = LONCOL_list
data['LATCOL'] = LATCOL_list
data['HBLON'] = HBLON_list
data['HBLAT'] = HBLAT_list
data['geometry'] = geometry_list
data

对创建的栅格绘制查看其空间分布。
data.plot(edgecolor = (0,0,0,1),linewidth = 0.2)

利用GeoDataFrame的intersects方法,输入行政区划的Polygon几何图形,将行政区划边界外的栅格剔除。
# 将前面读取的GeoDataFrame用unary_union方法合并为一个Polygon图形作为研究范围 roi = sz.unary_union # 筛选出研究范围的栅格 grid_sz = data[data.intersects(roi)] grid_sz.plot(edgecolor = (0,0,0,1),linewidth = 0.2)

将栅格数据保存至本地
grid_sz.to_file(r'D:\Project\Jupyter_Project\Data\data\grid_sz1.josn', driver = 'GeoJSON')
(2)GPS数据的栅格对应与集计
GPS数据以经纬度坐标的形式记录,计算得到每个GPS点对应的栅格编号。然后,再基于栅格标号统计每个栅格内GPS数据量。
import pandas as pd
# 读取数据
data = pd.read_csv('D:/Project/Jupyter_Project/Data/data/TaxiData-Sample.csv',header = None)
data.columns = ['VehicleNum','Stime','Lng','Lat','OpenStatus','Speed']
# 数据对应的栅格经纬度编号
data['LONCOL'] = ((data['Lng'] - (lonStart - deltaLon / 2))/deltaLon).astype('int')
data['LATCOL'] = ((data['Lat'] - (latStart - deltaLat / 2))/deltaLat).astype('int')
# 集计栅格数量
data_distribution = data.groupby(['LONCOL','LATCOL'])['VehicleNum'].count().rename('count').reset_index()
# 剔除不在研究范围内的OD记录
data_distribution = data_distribution[(data_distribution['LONCOL']>=0)&(data_distribution['LATCOL']>=0)&(data_distribution['LONCOL']=0)&(oddata['SLATCOL']>=0)&
(oddata['ELONCOL']>=0)&(oddata['ELATCOL']>=0)&
(oddata['SLONCOL']